0 ę²čį
║Į╠ņ’wąąŲ„═©│Ż▓╔ė├╦┼Ę■ŽĄĮy×ķȵÖCĄ─ū„äėčbų├Ż¼═©▀^╦┼Ę■ū„äėŲ„ā╚▓┐Ą─“īäėčbų├Ż¼īŹ¼FȵÖC╦┼Ę■ÖCśŗĄ─Å═ļsÖCąĄ▀\äėŻ¼Ä¦äėęĒȵȵ▌S▐DäėŻ¼▀MČ°╩╣ęĒȵ▐DäėŻ¼ūŅĮK═©▀^ęĒȵĄ╚╗Ņäė▓┐╝■īŹ¼F’wąąŲ„Ą─ū╦æB(t©żi)┐žųŲĪŻį┌’wąąŲ„ĮYśŗ▓╝ŠųįOėŗĢrŻ¼’wąąŲ„ā╚▓┐Ą─┼ō¾w┐šķgėąŽ▐Ż¼┼ō¾wā╚▓┐░▓Ę┼ļŖÜŌįOéõ▌^ČÓŻ¼ČµÖC╦┼Ę■ŽĄĮy▀\äė░³Įj▌^┤¾Ż¼▀@ą®å¢Ņ}Č╝Ģ■įņ│╔ȵÖC╦┼Ę■ŽĄĮy▀\äėĖ╔╔µĪŻę“┤╦ȵÖC╦┼Ę■ŽĄĮyį┌Ė∙ō■ęĒȵĄ─╩╣ė├ę¬Ū¾┤_Č©│▀┤ń║═┴”Šžų«║¾Ż¼▀Ćę¬Ė∙ō■Ųõ░▓Ę┼į┌’wąąŲ„Ą─╬╗ų├▀Mąą▀\äėĖ╔╔µĘų╬÷Öz▓ķĪŻ│Żė├Ą─▀\äėĖ╔╔µĘų╬÷▄ø╝■╚ńADAMSĪóNXĪóCreo║═CATIAĄ╚Ż¼ė╔ė┌CATIA▄ø╝■į┌╚²ŠSĮ©─ŻĢrŠ▀ėąÅŖ┤¾Ą─Ū·├µįOėŗ╣”─▄║═īŹ¾wĮ©─Ż╣”─▄Ż¼═¼ĢrCATIA▄ø╝■Š▀ėą┴╝║├Ą─▀\äėĘ┬šµĘų╬÷╣”─▄Ż¼ę“Č°ÅVĘ║į┌’wąąŲ„ĮYśŗįOėŗ║═ļŖŲ„įOéõįOėŗųą╩╣ė├ĪŻ
▒Š╬─╗∙ė┌CATIA▄ø╝■įö╝ÜĮķĮB║Į╠ņ’wąąŲ„┼ō¾w░³Įj║═ȵÖC╦┼Ę■ŽĄĮy─Żą═äō(chu©żng)Į©ĪóȵÖC╦┼Ę■ŽĄĮy▀\äėĘ┬šµīŹ¼F▀^│╠║═Ė╔╔µÖz▓ķĘĮĘ©ĪŻ
1 ┼ō¾w░³Įj║═╦┼Ę■ŽĄĮy▓╝Šų
ȵÖC╦┼Ę■ŽĄĮyį┌▀\äėĖ╔╔µÖz▓ķŪ░Ż¼ąĶę¬┤_Č©’wąąŲ„Ą─┼ōā╚░³ĮjŻ¼▓óĖ∙ō■ęĒȵį┌’wąąŲ„Ą─īŹļH╬╗ų├┤_ȩȵÖC╦┼Ę■ŽĄĮyį┌’wąąŲ„┼ōā╚╬╗ų├Ż¼╚ńłD1╦∙╩ŠĪŻį┌▀\äėĖ╔╔µÖz▓ķĢrŻ¼«ö╦┼Ę■ȵÖC┼c┼ō¾w░³Įj├µĖ╔╔µŻ¼▒Ē├„╦┼Ę■ȵÖC▓╝Šų▓╗║Ž└Ē╗“╦┼Ę■ȵÖCįOėŗ▓╗ØMūŃę¬Ū¾ĪŻ

2 ȵÖC╦┼Ę■ŽĄĮyöĄ─Ż
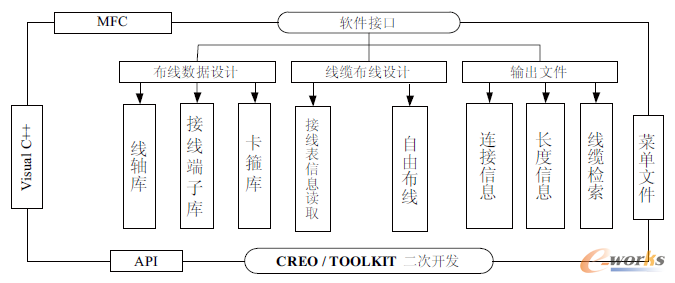
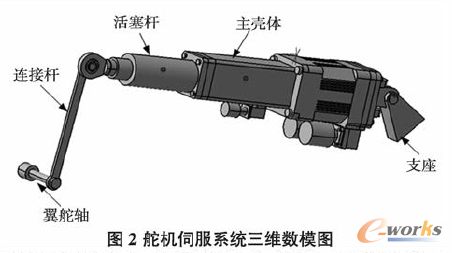
└¹ė├CATIA▄ø╝■Į©┴ó║├ȵÖC╦┼Ę■ŽĄĮyĄ─╚²ŠSöĄ─ŻŻ¼Ųõųą░³└©ęĒȵ▌SĪó▀BĮėŚUĪó╦┼Ę■ū„äėŲ„Ą─╗Ņ╚¹ŚUĪó╦┼Ę■ū„äėŲ„Ą─ų„Üż¾w║═ų¦ū∙ĪŻ╚²ŠSöĄ─Ż╩ŠęŌłD╚ńłD2╦∙╩ŠĪŻĖ∙ō■Į©┴ó║├Ą─ȵÖC╦┼Ę■ŽĄĮy╚²ŠS─Żą═║═╦┼Ę■ÖCśŗĄ─čb┼õĻPŽĄŻ¼į┌CATIA▄ø╝■Ą─čb┼õ─ŻēKųąī”Ė„éĆ┴Ń╝■▀Mąąčb┼õŻ¼┐╔ęįĖ∙ō■ąĶę¬Į©┴óĖ„éĆ┴Ń╝■Ą─╝s╩°ĻPŽĄŻ¼ę▓┐╔ęįį┌║¾└m(x©┤)Ą─▀\äėĘ┬šµųąĮ©┴óĮė║ŽĢrŻ¼▄ø╝■ūįäėĮ©┴óĖ„éĆ┴Ń╝■ų«ķgĄ─▀BĮė╝s╩°ĻPŽĄĪŻ
3 ȵÖC╦┼Ę■ŽĄĮy▀\äė▀^│╠
╦┼Ę■ū„äėŲ„į┌ā╚▓┐ū„äėļŖÖC“īäėŽ┬Ż¼═Ųäė┼cū„äėŲ„Üż¾w▀BĮėĄ─╗Ņ╚¹ŚUŻ¼╩╣╗Ņ╚¹ŚU«a╔·╦«ŲĮ▀\äėŻ¼╗Ņ╚¹ŚU═Ųäė▀BĮėŚUŻ¼▀BĮėŚUĦäėęĒȵ▌S▐DäėŻ¼═¼Ģr╗Ņ╚¹ŚUę▓Įo╦┼Ę■ū„äėŲ„ų„Üż¾wę╗éĆŽ“║¾Ą─Ę┤ū„ė├┴”Ż¼╩╣Ą├╦┼Ę■ū„äėŲ„ų„Üż¾w└@ų¦ū∙▐DäėĪŻų¦ū∙╣╠Č©į┌’wąąŲ„╔ŽŻ¼ęĒȵ▌S│²▐Däė═ŌŻ¼ŽÓī”’wąąŲ„¤oŲĮäėĪŻ
4 ▀\äėĖ╔╔µÖz▓ķĘĮĘ©
ȵÖC╦┼Ę■ŽĄĮyį┌▀\äė▀^│╠ųąų„ę¬ėą2ĘN▀\äėĖ▒:ę╗ĘN╩Ūą²▐D▀\äėĖ▒Ż¼┴Ēę╗^ĘN╩Ū└Ōą╬▀\äėĖ▒Ż¼│²┤╦▀ĆėąäéąįĖ▒ĪŻŲõųąąĶę¬äō(chu©żng)Į©ą²▐D▀\äėĖ▒Ą─┴Ń╝■ėąęĒȵ▌S┼c’wąąŲ„Īó▀BĮėŚU┼c╗Ņ╚¹ŚUĪóų„Üż¾w┼cų¦ū∙;ąĶę¬äō(chu©żng)Į©└Ōą╬▀\äėĖ▒Ą─┴Ń╝■╩Ū╗Ņ╚¹┼cų„Üż¾w;ąĶę¬äō(chu©żng)Į©äéąįĖ▒ėą▀BŚU┼cęĒȵ▌SĪŻ▀\äėĖ▒äō(chu©żng)Į©═Ļ│╔║¾Ż¼Ė∙ō■▀\äėĖ▒ų«ķgĄ─▀\äė║»öĄĻPŽĄ└¹ė├│╠ą“┐žųŲ═Ļ│╔├³┴ŅĒŚĄ─äō(chu©żng)Į©Ż¼└¹ė├Ė╔╔µĘų╬÷─ŻēKÖz▓ķȵÖC╦┼Ę■ŽĄĮy▀\äėĢrĄ─Ė╔╔µĀŅørĪŻ
4.1 ą²▐DĖ▒äō(chu©żng)Į©
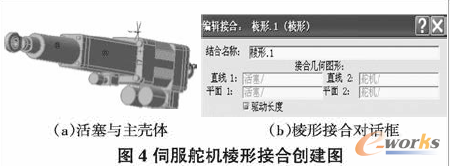
į┌DMU▀\äėÖCśŗ╣żū„┼_ųąŻ¼▀xō±▀\äėĮė║Ž─ŻēKųąĄ─ą²▐DĮė║ŽŻ¼äō(chu©żng)Į©ą┬Ą─ÖCąĄčbų├ĪŻČµÖC╦┼Ę■ŽĄĮyą²▐D▀\äėĖ▒ėąęĒȵ▌S┼c’wąąŲ„Īó▀BĮėŚU┼c╗Ņ╚¹ŚUĪóų„Üż¾w┼cų¦ū∙╚²ī”Ż¼į┌ą²▐DĮė║Žī”įÆ┐“ųąŻ¼Ęųäe▀xō±ęĒȵ▌S┼c’wąąŲ„Īó▀BĮėŚU┼c╗Ņ╚¹ŚUĪóų„Üż¾w┼cų¦ū∙ŽÓĻP┴Ń╝■ę╗ī”ųž║Ž▌SŠĆ║═ę╗ī”ŲĮąąŲĮ├µŻ¼═Ļ│╔ą²▐DĮė║ŽĄ─äō(chu©żng)Į©Ż¼╚ńłD3╦∙╩ŠĪŻ

4.2 └Ōą╬▀\äėĖ▒äō(chu©żng)Į©
▀xō±DMUŲĮ┼_Ž┬Ą─└Ōą╬Įė║Ž─ŻēKŻ¼ČµÖC╦┼Ę■ŽĄĮy└Ōą╬▀\äėĖ▒╩Ū╗Ņ╚¹┼cų„Üż¾wĪŻį┌└Ōą╬Įė║Žī”įÆ┐“ųąŻ¼Ęųäe▀xō±╗Ņ╚¹┼cų„Üż¾w┴Ń╝■ŲĮąąę╗ī”ų▒ŠĆ║═ŲĮąąę╗ī”ŲĮ├µ═Ļ│╔└Ōą╬Įė║Žäō(chu©żng)Į©ĪŻ└Ōą╬Įė║Žäō(chu©żng)Į©Ż¼╚ńłD4╦∙╩ŠĪŻ
4.3 äéąįĖ▒äō(chu©żng)Į©
▀xō±DMU▀\äėÖCśŗŲĮ┼_Ž┬Ą─äéąįĮė║Ž─ŻēKŻ¼ČµÖC╦┼Ę■ŽĄĮyäéąįĖ▒╩Ū▀BŚU┼cȵ▌SĪŻį┌äéąįĮė║Žī”įÆ┐“ųąŻ¼ų▒Įė▀x╚Ī▀BŚU║═ȵ▌S═Ļ│╔äéąįĮė║Žäō(chu©żng)Į©ĪŻäéąįĮė║Žäō(chu©żng)Į©Ż¼╚ńłD5╦∙╩ŠĪŻ
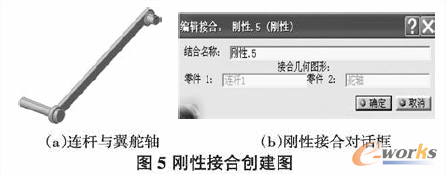
╦┼Ę■ȵÖCÖCśŗĄ─╚½▓┐▀\äėĖ▒Į©┴ó║¾Ż¼į┌DMU▀\äėÖCśŗŲĮ┼_ī”’wąąŲ„Ą─╣╠Č©╝■Į©┴ó╣╠Č©╝s╩°ĪŻ
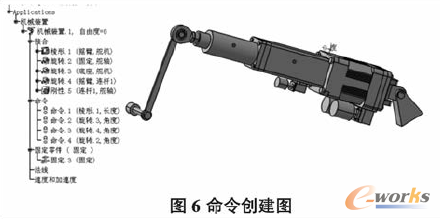
4.4 ├³┴Ņäō(chu©żng)Į©
į┌ĮYśŗśõųąŻ¼Ė∙ō■ȵÖC╦┼Ę■ŽĄĮy├┐ę╗éĆ▀\äėĖ▒Ą─▀\äėĘČć·Ż¼į┌Įė║ŽŽ▐ųŲ╬─▒Š┐“▌ö╚ļŠ▀¾wöĄųĄŻ¼═Ļ│╔├³┴ŅĄ─äō(chu©żng)Į©Ż¼╚ńłD6╦∙╩ŠĪŻ
4.5 ▀\äėĖ▒║»öĄĻPŽĄäō(chu©żng)Į©
į┌ĮYśŗśõŽ┬Ą─“├³┴Ņ”Ż¼ėęµI▀xō±“ŠÄ▌ŗ├³┴Ņ”Ż¼į┌├³┴ŅųĄ╬─▒Š┐“╠ijcō¶ėęµIŻ¼│÷¼F╣½╩ĮŠÄ▌ŗŲ„Ż¼▀xō±▀\äėĖ▒Ą─ģóöĄŻ¼ŪąōQų┴“ų¬ūR╣ż│╠”Ą─“ų¬ūRŅÖå¢╣żū„ŲĮ┼_”▀xō±“ęÄ(gu©®)ät”Ż¼Ė∙ō■ȵÖC╦┼Ę■ŽĄĮy▀\äėĖ▒ų«ķgĄ─▀\äė║»öĄĻPŽĄ═Ļ│╔│╠ą“┐žųŲĪŻŠÄ▌ŗ├³┴ŅŻ¼╚ńłD7╦∙╩ŠĪŻ

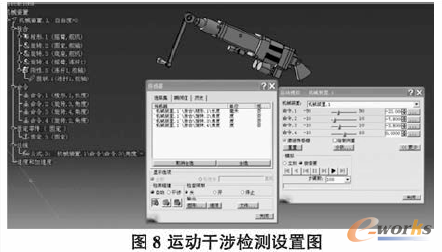
4.6 Ė╔╔µÖz▓ķ╣”─▄äō(chu©żng)Į©
į┌DMU—░Ńäė«ŗŲĮ┼_Ž┬Ż¼įOų├“┼÷ū▓─Ż╩Į”×ķ“┼÷ū▓Öz£y═Żų╣”─Ż╩ĮĪŻ▀xō±▀\äė─ŻöMĄ─“Ę©ätŪ·ŠĆ▀Mąą─ŻöM”▓ó╝ż╗Ņé„ĖąŲ„Ż¼į┌é„ĖąŲ„Ą─ī”įÆ┐“Ž┬įOų├Öz£y┼÷ū▓Ż¼╚ńłD8╦∙╩ŠĪŻ▓źĘ┼ÖCśŗ▀\äėåóäėÖz£yĪŻĖ∙ō■Ė╔╔µÖz▓ķĮY╣¹┤_ȩȵÖC╦┼Ę■ŽĄĮy▀\äė▀^│╠ųą┼cĮoČ©Ą─║Į╠ņ’wąąŲ„░³Įj«a╔·Ė╔╔µĄ─╬╗ų├╝░▀\äėģóöĄŻ¼ė├ęįųĖī¦ČµÖC╦┼Ę■ŽĄĮyā×(y©Łu)╗»įOėŗĪŻ
5 ĮY╣¹ī”▒╚
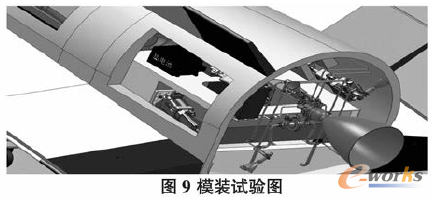
└¹ė├▒Š╬─╦∙ĮķĮBĄ─ȵÖC╦┼Ę■ŽĄĮy▀\äėĖ╔╔µÖz▓ķĘĮĘ©ķ_š╣Ą─Ę┬šµĮY╣¹Ż¼┼c─Żčbįć“×ĮY╣¹▀Mąą┴╦ī”▒╚ĪŻā╔š▀═Ļ╚½ę╗ų┬ĪŻ─Żčbįć“×╚ńłD9╦∙╩ŠĪŻ
6 ĮYšZ
▒Š╬─įö╝ÜĮķĮB┴╦CATIA▄ø╝■ī”║Į╠ņ’wąąŲ„ȵÖC╦┼Ę■ŽĄĮyöĄ─ŻĮ©┴óĪóčb┼õĪó▀\äėĘ┬šµ║═Ė╔╔µÖz▓ķĄ─╚½▓┐▀^│╠ĪŻ╬─ųą╦∙╩÷ĘĮĘ©┐╔×ķŲõ╦³ÖCśŗ▀\äėĘ┬šµ║═Ė╔╔µÖz▓ķ╠ß╣®ģó┐╝ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śI(y©©)äšŅIė“ĪóąąśI(y©©)æ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śI(y©©)äš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśI(y©©)äšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śI(y©©)ĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śI(y©©)ą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌CATIAĄ─ȵÖC╦┼Ę■ŽĄĮy▀\äėĖ╔╔µÖz▓ķĘĮĘ©
▒Š╬─ŠWųĘŻ║http://m.hanmeixuan.com/html/consultation/10839624330.html






┬į║Žū„")