1 ę²čį
T╩ĮŻ©±R└š└’╩ĮŻ®┼e╔²ÖCśŗę“Š▀ėą╩Ī┴”Īóė═ĖūūŅ┤¾═Ų┴”▌^ąĪĪóė═ē║╠žąį╠¢Īóę║ē║ŽĄĮyē║┴”ļS┼e╔²ĮŪūā╗»ŲĮŠÅĄ╚ā׳cŻ¼╦∙ęįÅVĘ║æ¬ė├ė┌ūįąČŲ¹▄ćųąĪŻĘų╬÷įōÖCśŗĄ─ĘĮĘ©ėąĮŌ╬÷Ę©Īóū„łDĘ©Ą╚ĪŻĮŌ╬÷Ę©Š½┤_Ż¼Ą½öĄīW╣½╩ĮÅ═ļsŻ¼ū„łDĘ©ļm║åå╬Ż¼Ą½š`▓Ņ▌^┤¾ĪŻČ■ŠS└LłD▄ø╝■Ą─æ¬ė├╩╣Ą├ū„łDĘ©Ė³╚▌ęūīŹ¼FŻ¼Ą½ÖCśŗ╔Žśŗ╝■Ą─╬╗ų├▀ĆąĶę└┐┐é„ĮyĄ─ū„łDĘ©üĒīŹ¼FŻ¼╣żū„┴┐╚į╚╗║▄┤¾ĪŻĘų╬÷ÖCśŗĄ─Ė╔╔µ╝░╩▄┴”ĀŅør═∙═∙╩Ū║åå╬ųžÅ═Ą─╣żū„Ż¼Ęų╬÷š▀śOęū│÷¼F▓ŅÕeŻ¼įņ│╔Õeš`Ą─ĮY╣¹ĪŻģóöĄ╗»įOėŗĄ─│÷¼FŻ¼╩╣Ą├▀@ĒŚ╣żū„┤¾┤¾║å╗»Ż¼┐sČ╠┴╦Ęų╬÷ėŗ╦ŃĄ─ĢrķgŻ¼£p▌p╝╝ąg╚╦åTĄ─╣żū„┴┐Ż¼╠ßĖ▀┴╦ą¦┬╩ĪŻ
ģóöĄ╗»įOėŗŻ¼Š═╩ŪīóÖCśŗųąĖ„śŗ╝■Ą─│▀┤ńČ©┴x│╔ģóöĄūā┴┐Ż¼═©▀^Ė─ūāŲõųąĄ─ę╗éĆ╗“öĄéĆģóöĄĄ─öĄųĄŻ¼š¹éĆÖCśŗŲõ╦³▓┐ĘųĖ·ų°┬ōäėŻ¼CATIA┐╔ęį║▄ų▒ė^Ą─īóąĶꬥ─öĄųĄ’@╩Š│÷üĒŻ¼▀MČ°īŹ¼F┐ņ╦┘įOėŗ║═ā×╗»įOėŗĪŻ
2 T╩Į┼e╔²ÖCśŗ▀\äėĖ╔╔µĄ─┤_Č©
T╩Į┼e╔²ÖCśŗį┌▀\äė▀^│╠ųą┐╔─▄┤µį┌Ė╔╔µŻ¼╚ń╚²ĮŪ▒█┼c└ŁŚU╝ėÅŖ░Õų«ķgĪó└ŁŚU╔Ž▓┐┼c▄ćĹė═Ėūų¦│ąÖM┴║ų«ķgĪó└ŁŚUŽ┬▓┐┼cĄū▒Pā”ÜŌ═▓ų«ķgĪó╚²ĮŪ▒█┼c▄ćĹĄū░Õų«ķgĄ╚ĪŻŪ░╚²ĘNŪķørę╗░Ńį┌ÖCśŗ│§╩╝╬╗ų├ĢrŠ═┐╔ęį░l¼F╩Ūʱ┤µį┌Ż¼į┌▀@└’ų„꬚ä╚ń║╬└¹ė├CATIAģóöĄ╗»┤_Č©T╩Į┼e╔²ÖCśŗųą╚²ĮŪ▒█┼cĄū░Õų«ķgĄ─Ė╔╔µĪŻīó┼e╔²ÖCśŗĖ„ģóöĄį┌CATIA▓▌łDųą└LųŲ│÷üĒ▓óś╦ūóŲõ│▀┤ńŻ¼╚ńłD1╦∙╩ŠŻ¼ŲõųąAĪóBĪóC╚²³c×ķ╚²ĮŪ▒█Ą─╚²Ēö³cŻ¼0³c×ķ▄ćĹ║¾ą²▐D³cŻ¼D³c×ķ└ŁŚU╣╠Č©ū∙Ż¼E³c×ķ┼e╔²ė═Ėū╣╠Č©ū∙ĪŻ
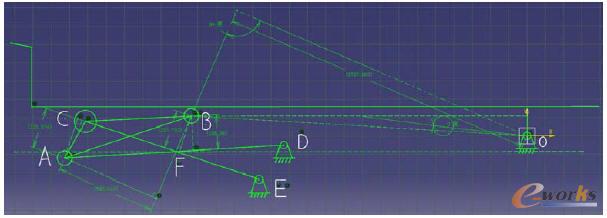
łD1 CATIAųąĖ„ÖCśŗ╬╗ų├▓▌łD
┼e╔²ÖCśŗ╠Äė┌│§╩╝╬╗ų├ĢrŻ¼┼e╔²ĮŪ×ķ0Č╚Ż¼³cō¶CATIA╣żŠ▀Ö┌╔Ž░┤ŌoŻ¼╚╗║¾ś╦▀xųą│▀┤ń0Č╚Ż¼▀@ĢrĢ■ÅŚ│÷“ųŲū„╝s╩°äė«ŗ”ī”įÆ┐“Ż¼╚ńłD2ĪŻ
łD2 ╝s╩°äė«ŗī”įÆ┐“
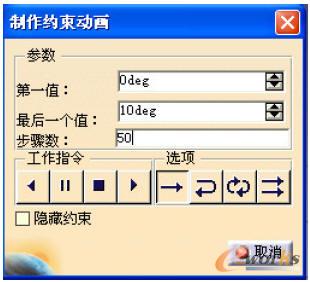
ę“┤¾▓┐ĘųĖ╔╔µ░l╔·į┌5Č╚ū¾ėęŻ¼×ķ┴╦ė^▓ņĖ╔╔µŪķørŻ¼īóūŅ┤¾┼e╔²ĮŪįOų├│╔┬į┤¾ė┌Ė╔╔µ░l╔·ĢrĄ─ĮŪČ╚Ż¼░č“ūŅ║¾ę╗éĆųĄ”ģóöĄĖ─×ķ10degŻ¼“▓Į¾EöĄ”┐╔Ė∙ō■īŹļHę¬Ū¾▌ö╚ļŻ¼öĄųĄįĮ┤¾Ż¼▀\äėįĮ┐ņŻ¼▀@└’įOų├×ķ50Ż¼Įėų°³cō¶“╣żū„ųĖ┴Ņ”Ž┬├µĄ─▓źĘ┼░┤ŌoŻ¼▀@Ģrš¹éĆ┼e╔²ÖCśŗŠ═ķ_╩╝Ę┬šµ▀\äėŻ¼į┌▀\äė▀^│╠ųą╬ęéāų„ę¬ė^▓ņ╚²ĮŪ▒█Ą─C³c┼c▄ćĹĄž░Õų«ķgĄ─ķgŽČŻ¼╚ń╣¹░l╔·Ė╔╔µätį┌CATIA▓▌└Lųąųžą┬š{š¹ŽÓĻPśŗ╝■ģóöĄŻ¼ŲõėÓģóöĄīóļSų«┬ōäėŻ¼Įėų°ųžÅ═╔Ž╩÷▓┘ū„Ż¼ų▒ų┴Ž¹│²Ė╔╔µĪŻ
3 ┼e╔²ÖCśŗĄ─╩▄┴”Ęų╬÷╝░ėŗ╦ŃĘĮĘ©
«ö┼e╔²ĮŪ×ķ0°ĢrŻ¼╚Ī▄ćĹ×ķ蹊┐ī”Ž¾╩▄┴”Ęų╬÷ęŖłD3ĪŻ
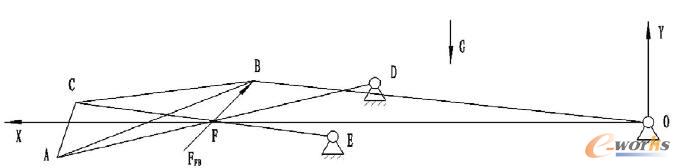
łD3 ┼e╔²ÖCśŗ╩▄┴”Ęų╬÷łD
ė╔┴”ŠžŲĮ║ŌłD┐╔ų¬∑MO=0Ż¼╝┤G×XG-FFB×DOFB=0Ż¼
┤·╚ļöĄō■Ą├▄ćĹī”╚²ĮŪ▒█A³cĘ┤┴”FFB=G×xG/DOFB (1)
«ö┼e╔²ĮŪ×ķ0°ĢrŻ¼╚Ī╚²ĮŪ▒█×ķ蹊┐ī”Ž¾╩▄┴”Ęų╬÷ęŖłD4ĪŻ
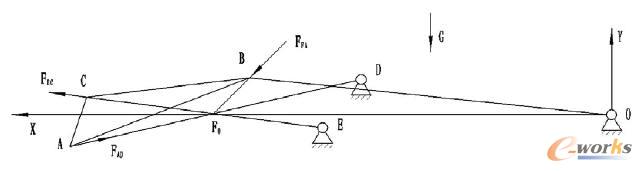
łD4 ┼e╔²ÖCśŗ╩▄┴”Ęų╬÷łD
ė╔┴”ŠžŲĮ║ŌłD┐╔ų¬∑MA=0Ż¼╝┤FEC×DAEC-FBF×DABF=0Ż¼
┤·╚ļöĄō■Ą├ė═ĖūūŅ┤¾┼e╔²┴”FEC=FBP×DABF/DAEC (2)
ėų∑MB-OŻ¼╝┤FAD×DBAD-FEC×DBEC=0Ż¼
┤·╚ļöĄō■Ą├└ŁŚUūŅ┤¾└Ł┴”FAD=FEC×DBEC/DBAD (3)
╩Į(1)Īó(2)Īó(3)ųąŻ¼
G-žøŽõ┼cžø╬’ųž┴┐ų«║═Ż¼å╬╬╗NŻ╗
XG-žøŽõ┼cžø╬’ųžą─X▌Sū°ś╦Ż¼å╬╬╗mmŻ╗
DOFB-O³cĄĮų▒ŠĆFBĄ─ŠÓļxŻ¼å╬╬╗mm
DABF-A³cĄĮų▒ŠĆBFĄ─ŠÓļxŻ¼å╬╬╗mm
DAEC-A³cĄĮų▒ŠĆECĄ─ŠÓļxŻ¼å╬╬╗mm
DBEC-B³cĄĮų▒ŠĆECĄ─ŠÓļxŻ¼å╬╬╗mm
DBAD-B³cĄĮų▒ŠĆADĄ─ŠÓļxŻ¼å╬╬╗mm
╩Į(1)Īó(2)Īó(3)ųąŻ¼┐╔ęį┐┤│÷ėŗ╦ŃĖ„┴”Ą─┤¾ąĪÜwĖ∙ĄĮĄū▀Ć╩Ūę¬ėŗ╦Ń╩ĮųąDDFEĪóDABFĪóDAECĪóDBECĪóDBAD▀@ÄūĘNŠÓļxŻ¼Č°ėŗ╦Ń▀@ÄūĘNŠÓļxėąā╔ĘNĘĮĘ©Ż║
ę╗╩Ū└¹ė├╝āöĄīWĘĮĘ©Ż¼Ž╚Ė∙ō■ęčų¬Śl╝■Ū¾│÷AD┼cECĄ─Į╗³cFū°ś╦║¾Ż¼╚╗║¾į┘Ū¾│÷Ė„³cĄĮų▒ŠĆĄ─ŠÓļxŻ¼▀@śėĢ■ėą┤¾┴┐Ę▒¼ŹĄ─ėŗ╦ŃŻ¼Č°Ūę╝┤╩╣ėŗ╦Ń│÷Ą─ę▓ų╗╩Ūį┌┼e╔²ÖCśŗį┌│§╩╝ĢrĄ─öĄųĄŻ¼ėŗ╦Ń├┐ę╗éĆ┼e╔²ĮŪČ╚ĢrČ╝ąĶę¬į┌ųžą┬ėŗ╦Ńę╗Ž┬Ż¼▀@śėŠ═į÷╝ė┴╦įOėŗ╚╦åTĄ─╣żū„┴┐ĪŻ
Č■╩Ū└¹ė├CATIA▓▌└LųąĄ─ģóöĄ╗»╣”─▄Ž╚īóÖCśŗ▀\äė║åłD░┤1Ż║1▒╚└²▌ö╚ļ║¾Ż¼į┘ė╔ėŗ╦ŃÖC▀\╦Ń║¾┐╔ų▒Įėį┌▓▌łD╔Ž½@╚ĪąĶꬥ─öĄųĄŻ¼╚ńłD1╦∙╩ŠŻ¼Č°Ūęį┌┼e╔²ĮŪČ╚ūā╗»ĢrŻ¼Ė„│▀┤ńļSų«┬ōäėŻ¼─▄ē“£╩┤_’@╩Š│÷Ė„éĆąĶꬥ─ģóöĄŻ¼╩╣ėŗ╦Ń▀^│╠┤¾┤¾║å╗»Ż¼£p╔┘ėŗ╦Ń▀^│╠ųąĄ─ųžÅ═ä┌äėŻ¼▀MČ°£p▌pįOėŗ╚╦åT╣żū„┴┐ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║CATIAģóöĄ╗»įOėŗį┌ūįąČŲ¹▄ćįOėŗųąĄ─æ¬ė├
▒Š╬─ŠWųĘŻ║http://m.hanmeixuan.com/html/solutions/14019315021.html