ļŖńPū„×ķ┤¾ą═┬Č╠ņ▓╔ĄVĄ─ų„ę¬čbéõų«ę╗Ż¼ė├ė┌ĄV╔Į▒Ē├µ╬’Ą─äāļx║═ĄV╩»Ą─▓╔čbū„śIĪŻ░┤ńPČĘ╚▌┴┐┐╔Ęų×ķŻ║1m3ęįŽ┬Ą─ąĪą═ļŖńPŻ¼5m3ęįŽ┬Ą─ųąą═ļŖńPŻ¼15m3ęįŽ┬Ą─ųžą═ļŖńP║═15m3ęį╔ŽĄ─Š▐ą═ļŖńPĪŻłD1╩Ū├└ć°P&H╣½╦Š4100XPCą═ļŖńPĪŻ─┐Ū░╩└Įń╔Ž─▄ūįų„čąųŲ55m3ęį╔ŽŠ▐ą═ļŖńPĄ─Ų¾śIŻ¼ų╗ėą├└ć°P&H╣½╦ŠĪó├└ć°┐©╠ž▒╦└šĪó╠½įŁųž╣żĄ╚╚²╝ęŻ¼Ųõųą├└ć°P&H╣½╦Š╚½Ū“╩ął÷š╝ėą┬╩Šė╩└ĮńĄ┌ę╗╬╗Ż¼╬ęć°Ą─Š▐ą═ļŖńP╚įų„ę¬ę└┘ćė┌▀M┐┌Ż¼ę“┤╦╠ßĖ▀ć°ā╚Š▐ą═ļŖńPĄ─įOėŗ║═╔·«a╦«ŲĮŻ¼Š▀ėąųžę¬ęŌ┴xĪŻ

łD1 ├└ć°P&H╣½╦Š4100XPCą═ļŖńP
1 ļŖńPĄ─ĮYśŗ╝░╣żū„įŁ└Ē
ļŖńPų„ę¬ė╔ąąū▀čbų├Īó╗ž▐D┐“╝▄Īó╔Ž▓┐ŲĮ┼_║══┌Š“ÖCśŗ╦─┤¾▓┐ĘųĮM│╔Ż¼ęŖłD2ĪŻļŖńPĄ─═┌Š“ū„śI░³└©═Ųē║Īó╠ß╔²Īó╗ž▐D║═ąČ┴Ž╦─éĆų„ę¬äėū„Ż¼ŲõųąŻ¼ļŖńP═┌Š“ÖCśŗĄ─▀\äė░³└©╠ß╔²▀\äė║══Ųē║▀\äėĪŻ╠ß╔²▀\äė╩Ūė╔╠ß╔²ļŖÖCĦäėĀ┐ę²õōĮz└KīŹ¼FĄ─Ż¼═Ųē║▀\äė╩Ū═©▀^²X▌å╗“õōĮz└K═Ųē║ČĘŚUīŹ¼FĄ─Ż¼ūŅ║¾═©▀^╠ß╔²▀\äė┼c═Ųē║▀\äėĄ─┼õ║Ž═Ļ│╔═┌Š“▀^│╠ĪŻ

łD2 P&4100XPCą═ļŖńP╚²ŠS─Żą═
Š▐ą═ļŖńPĄ─ČĘŚUĮYśŗų„ę¬ėąā╔ĘNŻ¼ę╗ĘN╩Ū┐©╠žŲż└š╣½╦Š▓╔ė├Ą─ŠWą╬Įž├µČĘŚUĄ─õōĮz└K═Ųē║╩ĮĮYśŗŻ║┴Ēę╗ĘN╩Ū├└ć°P&H╣½╦Š║═╠½įŁųž╣ż▓╔ė├Ą─²X▌å²XŚlĄ─═Ųē║╩ĮČĘŚUĮYśŗŻ¼═©▀^ļŖÖC£p╦┘ÖCĦäė═Ųē║²X▌å▀\äėŻ¼═Ųē║²X▌å║═ČĘŚU╔ŽĄ─²XŚl«a╔·ŽÓī”▀\äėŻ¼Å─Č°š{š¹ńPČĘĄ─═┌Š“ĘČć·║═ąČ┴Ž╬╗ų├ĪŻ
ļŖńPį┌š¹éĆ═┌Š“▀^│╠ųąńPČĘĄ─═┌Š“┴”Č╝╩Ū═©▀^ČĘŚUé„▀fĄ─Ż¼ę“┤╦ČĘŚUĮYśŗĄ─┐╔┐┐ąįī”░▓╚½╔·«a║═▒ŻšŽ╔·«aĄ─▀B└mąį╩«Ęųųžę¬Ż¼ę¬▒M┴┐Ę└ų╣ČĘŚUį┌╔·«a▀^│╠ųą░l╔·ÅØŪ·║═┼żŪ·ūāą╬ĪŻ
2 ĮYśŗĮ©─Ż
Ė∙ō■├└ć°P&H╣½╦Š┼cųąć°ę╗ųž║Žū„ųŲįņĄ─4100XPCą═ļŖńPĄ─ĮYśŗģóöĄŻ¼į┌Inventorųąī”ļŖńP▀Mąą╚²ŠSīŹ¾wĮ©─ŻĪŻ×ķ╠ßĖ▀Ę┬šµ▀^│╠Ą─ą¦┬╩Ż¼į┌Į©─Ż▀^│╠ųą▀m«ö║å╗»┴╦▓┐Ęų▓╗ģó┼c═┌Š“┴”║══┌Š“ūĶ┴”é„▀fĄ─┴Ń▓┐╝■║═ī”Ęų╬÷ėŗ╦ŃĮY╣¹ė░Ēæ▓╗┤¾Ą─ĮYśŗĪŻ
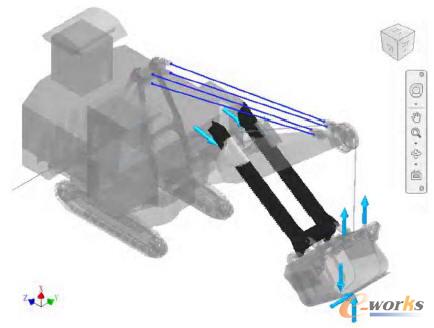
4100XPCą═ļŖńPĄ─═┌Š“čbų├ų„ę¬ė╔äė▒█Īó╠ņ▌åĪóČĘŚUĪó░░ū∙ĪóńPČĘĪó▀BŚUĪóńPČĘ╠ß┴║║═╠ß╔²õōĮz└KĮM│╔Ż¼╚ńłD3╦∙╩ŠĪŻ

łD3 ═┌Š“čbų├╩ŠęŌłD
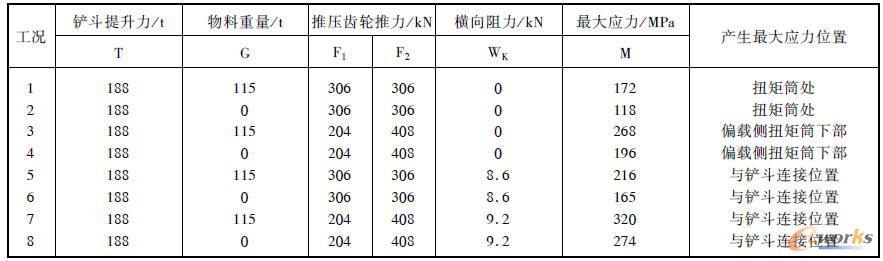
3 ═┌Š“čbų├Ą─▀\äėīWĘų╬÷
3.1 ╣żørĘų╬÷
į┌ļŖńP▀Mąą═┌Š“ū„śI▀^│╠ųąŻ¼ČĘŚUĄ─╩▄┴”╩ŪÅ═ļsČÓūāĄ─ĪŻ«öČĘ²XŪą╚╦ĄV╩»ĢrŻ¼ø_ō¶▌d║╔Ģ■═©▀^ńPČĘų▒Įėé„▀fĄĮČĘŚU╔ŽŻ¼ę“┤╦ų╗ę¬ńPČĘ╩▄ĄĮŲ½▌dŠ═Ģ■įņ│╔ČĘŚUĄ─Ų½▌dĪŻ═¼ĢrŻ¼ČĘŚUā╔é╚²X▌å²XŚlé„äėĄ─▓╗═¼▓Įę▓Ģ■įņ│╔ČĘŚUĄ─Ų½▌dĪŻ
ļŖńPį┌čb▌d╬’┴ŽĄ─ū„śIųą╩Ū╠ß╔²äėū„║══Ųē║äėū„Ą─Å═║Ž▀\äėŻ¼ČĘŚUć·└@═Ųē║²X▌åū÷Į³╦ŲŠWų▄▀\äėĪŻę“┤╦Ż¼«ö═┌Š“ūĶ┴”┴”▒█ūŅķLĢr╩ŪČĘŚUĄ─ūŅ╬ŻļU╣żørŻ¼╝┤ČĘŚU╔ņ│÷ūŅķLĢr×ķČĘŚUĄ─ūŅ╬ŻļU╣żørĪŻė╔ė┌ńPČĘį┌┐š▌d║═ØM▌d═┌Š“Ģrī”ČĘŚUĄ─ø_ō¶╩Ū▓╗═¼Ą─Ż¼▒Š╬─Ęų×ķ8ĘN╣żørī”═┌Š“čbų├▀Mąą▀\äėīWĘ┬šµŻ║
╣żør1Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼╠ß╔²õōĮz└KęįŅ~Č©╠ß╔²┴”╠ß╔²Ż¼ńPČĘØM▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør2Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼╠ß╔²õōĮz└KęįŅ~Č©╠ß╔²┴”╠ß╔²Ż¼ńPČĘ┐š▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør3Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼ū¾ėęā╔é╚═Ųē║┴”▓╗ī”ĘQŻ¼ā╔é╚═Ųē║²XŚlĘųäe│ą╩▄1/3║═2/3═Ųē║┴”Ż¼ńPČĘØM▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør4Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼ū¾ėęā╔é╚═Ųē║┴”▓╗ī”ĘQŻ¼ā╔é╚═Ųē║²XŚlĘųäe│ą╩▄1/3║═2/3═Ųē║┴”Ż¼ńPČĘ┐š▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør5Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼ńPČĘé╚²X╩▄ĄĮŲ½▌dŻ¼ńPČĘØM▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør6Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼ńPČĘé╚²X╩▄ĄĮŲ½▌dŻ¼ńPČĘ┐š▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør7Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼ū¾ėęā╔é╚═Ųē║┴”▓╗ī”ĘQŻ¼ńPČĘé╚²X╩▄ĄĮŲ½▌dŻ¼ńPČĘØM▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
╣żør8Ż║ČĘŚU╔ņ│÷ūŅķLŻ¼ū¾ėęā╔é╚═Ųē║┴”▓╗ī”ĘQŻ¼ńPČĘé╚²X╩▄ĄĮŲ½▌dŻ¼ńPČĘ┐š▌dĄ─Ņ~Č©╠ß╔²╣żørĪŻ
3.2 ▀\äėīWĘ┬šµ
į┌Inventorųąī”8ĘN╣żør▀MąąĘ┬šµąĶę¬Ė∙ō■4100XPCą═ļŖńPĄ─ŽÓĻPįOéõģóöĄėŗ╦ŃĖ„“īäė┴”Ą─┤¾ąĪŻ¼▓ó▀xō±┴”Ą─ū„ė├³cČ©┴xŽÓæ¬Ą─▌d║╔ĪŻ▒Š╬─ßśī”Ė„ų„ę¬▌d║╔ū„╚ńŽ┬Č©┴xŻ║Ņ~Č©╠ß╔²┴”═©▀^õōĮz└Kčžäė▒█╠ņ▌åŪąŠĆĘĮŽ“ū„ė├į┌ńPČĘ╠ß┴║╔ŽŻ╗Ņ~Č©═Ųē║┴”═©▀^═Ųē║²X▌åų▒Įėū„ė├į┌ČĘŚUā╔é╚═Ųē║²XŚl╔ŽŻ╗═┌Š“ūĶ┴”║═ńPČĘé╚Ž“┴”ų▒Įėū„ė├į┌ńPČĘČĘ²X╔ŽŻ╗ńPČĘā╚╬’┴ŽĄ─ųž┴”ūā╗»ū„ė├į┌ČĘ¾w║═ČĘķT╔ŽŻ¼╚ńłD4ĪŻĖ∙ō■į┌Į©─ŻĢrČ©┴xĄ─ĮYśŗ▓─┴ŽŻ¼ŽĄĮyį┌Ę┬šµ▀^│╠ųąĢ■ūįäė╝ė▌dĖ„▓┐╝■Ą─ųž┴”▀Mąąėŗ╦ŃŻ¼─ŻöM═┌Š“ÖCśŗīŹļH▀\äė▀^│╠ųąĄ─╩▄┴”ŪķørĪŻ
łD4 ═┌Š“čbų├Ą─═Ō▌d║╔╩ŠęŌłD
ė╔ė┌į┌═┌Š“▀^│╠ųąńPČĘ╩Ūę╗ų▒▀\äėĄ─Ż¼ū„ė├į┌ńPČĘé╚²X╔ŽĄ─ÖMŽ“═┌Š“ūĶ┴”WkĄ─ūŅ┤¾ųĄ╩ŪéĆūā╗»ųĄŻ¼Wk=MT/RĪŻŲõųąMT╩Ū╗ž▐DÖCśŗĄ─ūŅ┤¾ųŲäė┴”ŠžŻ¼R╩ŪńPČĘé╚²X╩▄┴”³cĄĮļŖńP╗ž▐Dųąą─Ą─ŠÓļxŻ¼į┌═┌Š“▀^│╠ųą╩Ūę╗éĆūā╗»ųĄĪŻ═©▀^ļŖÖCųŲäė╣”┬╩ėŗ╦Ń│÷MT=2.06×105N·mŻ¼īóWkČ©┴x×ķę╗éĆ║═RŽÓĻPĄ─║»öĄ▀Mąą▀\äėĘ┬šµĪŻūŅ║¾Ż¼īóūŅ┤¾═┌Š“╔ŅČ╚║═ūŅ┤¾═┌Š“Ė▀Č╚ū„×ķ▀\äėĘ┬šµĄ─Ų³c║═ĮK³c╬╗ų├Ż¼üĒ─ŻöMĖ„╣żørŽ┬═┌Š“čbų├Ą─▀\äėĪŻ
į┌Ę┬šµ═Ļ│╔║¾Ż¼Ė∙ō■ČĘŚUĖ„Ńq³cį┌Ė„Ģr┐╠Ą─╩▄┴”Ū·ŠĆŻ¼▀xō±Ė„Ńq³c╩▄┴”ūŅ┤¾Ą─Ģr┐╠Ż¼īóČĘŚUī¦╚ļæ¬┴”Ęų╬÷ŁhŠ│▀MąąėąŽ▐į¬Ęų╬÷ĪŻ
4 ėąŽ▐į¬Ęų╬÷
į┌ī”ČĘŚU▀MąąėąŽ▐į¬Ęų╬÷Ū░Ż¼ąĶę¬ī”ŠWĖ±äØĘų▀MąąįOų├ĪŻĖ∙ō■ČĘŚUĄ─ĮYśŗą╬╩ĮŻ¼═Ō┴”ų„ę¬═©▀^ā╔é╚Ą─²XŚl╝░4éĆĘųäe┼cńPČĘ║═▀BŚUŽÓ▀BĄ─Ńq³cū„ė├į┌ČĘŚU╔ŽĪŻį┌äØĘųČĘŚUŠWĖ±å╬į¬ĢrŻ¼īóęį╔Žų„ę¬╩▄┴”╬╗ų├║═║ĖĮėĮė┐p╠ÄĄ─å╬į¬įOų├Ą─ŽÓī”ąĪę╗ą®Ż¼╚ńłD5ĪŻ×ķ┴╦ūīėŗ╦ŃĮY╣¹Ė³×ķ£╩┤_Ż¼▒Š╬─īóŲĮŠ∙į¬╦ž┤¾ąĪįOų├×ķ0.1Ż¼░čČĘŚUäØĘų│╔┴╦107234éĆå╬į¬▀MąąĘų╬÷Ż¼Ęų╬÷ĮY╣¹ęŖ▒Ē1ĪŻ
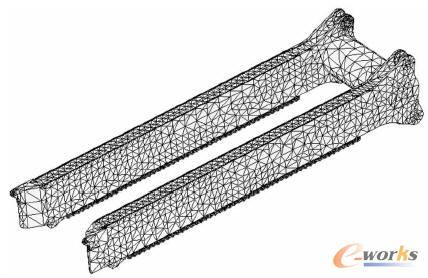
łD5 ČĘŚUĄ─ėąŽ▐į¬─Żą═
▒Ē1 Ė„╣żørųąČĘŚU╬ŻļUĢr┐╠╦∙╩▄æ¬┴”Ūķør
5 Ę┬šµĮY╣¹Ęų╬÷
═©▀^ī”▒╚8ĘN╣żørŽ┬Ą─Ęų╬÷ĮY╣¹Ż¼░l¼FČĘŚUį┌Ą┌8ĘN╣żørųą╦∙╩▄ĄĮĄ─æ¬┴”║═«a╔·Ą─ą╬ūāūŅ┤¾Ż¼▀_ĄĮ┴╦320MPa║═118.2mmŻ¼╚ńłD6ĪŻĄ½ė╔ė┌äė▒█ī”ČĘŚUūāą╬┌ģä▌Ą─ų¦ō╬║═╝s╩°Ż¼ČĘŚU╬▓▓┐Ą─ÅØŪ·ūāą╬āH×ķ└ĒšōųĄŻ¼īŹļH╣żū„ųą▓╗Ģ■«a╔·ūāą╬ĪŻ
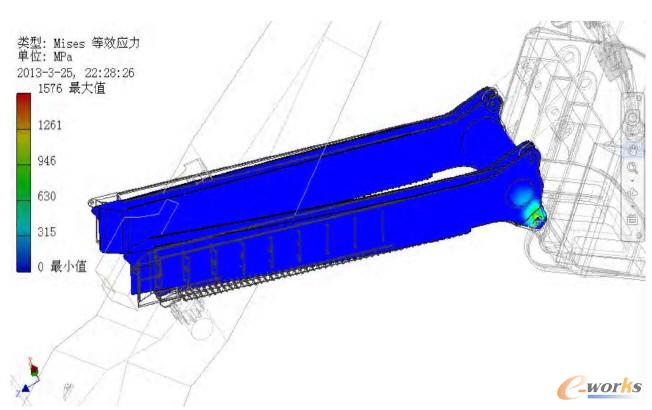
łD6 ╣żør8Śl╝■Ž┬ČĘŚU╩▄æ¬┴”ūŅ┤¾Ģr┐╠Ą─Ęų╬÷ĮY╣¹
═©▀^ī”▒╚Ė„╣żørĄ─ūŅ┤¾æ¬┴”ųĄŻ¼░l¼FńPČĘé╚²X╩▄ĄĮÖMŽ“Ų½▌dĄ─╣żørī”ČĘŚUĄ─ĮYśŗÅŖČ╚ė░ĒæūŅ┤¾Ż¼ČĘŚU┼cńPČĘ▀BĮėŃq³c╠ÄĄ─ūāą╬┌ģä▌▌^┤¾Ż¼═¼ĢrŻ¼═Ųē║²X▌å═Ųē║²XŚlĄ─╬╗ų├╝░┼żŠž═▓┼cā╔é╚Žõ┴║▀BĮė╠Äæ¬┴”ę▓▌^┤¾ĪŻ▀@┼cŠ▐ą═ļŖńPį┌╩╣ė├▀^│╠ųąČĘŚUĄ─ŲŻä┌ŲŲē─╬╗ų├╗∙▒ŠŽÓ═¼Ż¼▀@šf├„Ę┬šµĮY╣¹╩Ū╗∙▒Š║Ž└ĒĄ─ĪŻ
├└ć°P&H╣½╦Šį┌ųŲįņČĘŚUĢrų„ę¬▓╔ė├Ą─╩ŪŪ³Ę■ÅŖČ╚×ķ690MPaĄ─PH166ą═õō░Õ║═Ū³Ę■ÅŖČ╚×ķ345MPaĄ─PH180ą═õō░ÕŻ¼ā╔ĘNõō░ÕĄ─Ū³Ę■ÅŖČ╚Č╝ØMūŃ┴╦ŽÓæ¬╬╗ų├Ą─īŹļHŪ³Ę■ÅŖČ╚ąĶŪ¾ĪŻ
ļSų°ć°ā╚¤Æõō╣ż╦ć╦«ŲĮĄ─╠ßĖ▀Ż¼ć°ā╚╔·«aĄ─Ė▀ÅŖČ╚š{┘|║ŽĮõō░ÕŪ³Ę■ÅŖČ╚ę▓─▄ē“▀_ĄĮ600MPaęį╔ŽŻ¼╝┤╩╣┐╝æ]äė▌d║╔ø_ō¶Ą─░▓╚½ŽĄöĄŻ¼ć°ā╚õō░ÕĄ─Ū³Ę■śOŽ▐ę▓─▄ē“ØMūŃČĘŚUĄ─ÅŖČ╚ę¬Ū¾Ż¼ę“┤╦┐╔ęįšJ×ķ▀xė├ć°«aõō░ÕųŲįņŠ▐ą═ļŖńPĄ─ČĘŚUę▓╩Ū┐╔ąąĄ─ĪŻ
6 ĮYšō
▒Š╬─ī”├└ć°P&H╣½╦Š4100XPCą═ļŖńP▀Mąą┴╦╚²ŠSĮ©─ŻŻ¼▀xō±╬ŻļU╣żørī”ČĘŚU▀Mąą┴╦▀\äėīWĘ┬šµ║═ėąŽ▐į¬Ęų╬÷Ż╗═©▀^ī”Ę┬šµĮY╣¹Ą─Ęų╬÷═Ļ│╔┴╦ī”Š▐ą═ļŖńPć°«a╗»įOėŗĄ─╠Į╦„Ż¼▓ó×ķČĘŚUĄ─ć°ā╚ųŲįņ║═ŠSą▐╠ß╣®┴╦ę╗Č©Ą─ģó┐╝ę└ō■ĪŻ╚╗Č°Ż¼ę¬šµš²ęŌ┴x╔ŽīŹ¼FŠ▐ą═ļŖńPĄ─ć°«a╗»Ż¼▀ĆąĶŠC║Ž┐╝æ]ÖCśŗ─ŻæBĪó║ĖĮė▓─┴Ž║═║ĖĮė╣ż╦ćĄ╚ę“╦žŻ¼▓ó═©▀^ųŲįņśėÖC▀Mąąįć“×üĒÖz“׎ÓĻP└Ēšōėŗ╦ŃöĄō■Ż¼Å─Č°▀Mę╗▓ĮĄ─ā×╗»║══Ļ╔ŲįOėŗĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌InventorĄ─Š▐ą═ļŖńPČĘŚUėąŽ▐į¬Ęų╬÷
▒Š╬─ŠWųĘŻ║http://m.hanmeixuan.com/html/solutions/14019314407.html