0 ę²čį
ĪĪĪĪöĄ(sh©┤)┐žÖC┤▓╦┼Ę■▀MĮoŽĄĮy(t©»ng)╩Ū░┤š`▓Ņ┐žųŲĄ─ŽĄĮy(t©»ng)Ż¼é„Įy(t©»ng)Ą─ĘĮĘ©╩Ū▓╔ė├PID┐žųŲĪŻ│ŻęÄ(gu©®)PID┐žųŲįŁ└Ē║åå╬Ż¼╚▌ęūīŹ¼F(xi©żn)Ż¼ĘĆ(w©¦n)æB(t©żi)¤oņo▓ŅŻ¼ę“┤╦ķLŲ┌ęįüĒÅVĘ║æ¬ė├ė┌╣żśI(y©©)▀^│╠┐žųŲŻ¼▓ó╚ĪĄ├┴╦┴╝║├Ą─┐žųŲą¦╣¹ĪŻ╚╗Č°Ż¼é„Įy(t©»ng)Ą─PID┐žųŲų„ę¬╩Ū┐žųŲŠ▀ėą┤_Č©─Żą═Ą─ŠĆąį▀^│╠Ż¼Č°īŹļH╔ŽŻ¼╦┼Ę■ŽĄĮy(t©»ng)▀\ąąŪķørÅ═ļsŻ¼Š▀ėąģóöĄ(sh©┤)Ģrūāąį║═─Żą═▓╗┤_Č©ąįŻ¼Č°Ūę▀MĮoŽĄĮy(t©»ng)äėæB(t©żi)╠žąįĄ──Żą═Į©┴ó╔µ╝░ĄĮ─”▓┴╠žąįĄ─Ęų╬÷Ż¼═¼Ģr▀ĆĒÜ┐╝æ]ö_äė┼żŠžĄ─ę“╦žŻ¼ė╚Ųõ╩ŪÖCąĄŽĄĮy(t©»ng)Ą─ūĶ─ßĪóäéČ╚æT┴┐Ą╚ģóöĄ(sh©┤)Ż¼ę¬½@Ą├▌^║├Ą─PIDģóöĄ(sh©┤)║▄└¦ļyĪŻ─Ż║²┐žųŲ└Ēšō╩Ū┐žųŲŅIė“ųąĘŪ│Żėą░l(f©Ī)š╣Ū░═ŠĄ─ę╗éĆĘųų¦Ż¼╦³ęį▓╗ę└┘ćė┌▒╗┐žī”Ž¾Ą─öĄ(sh©┤)īW─Żą═Č°▒╗ÅVĘ║Ą─æ¬ė├ė┌╣żśI(y©©)╔·«a(ch©Żn)ųąĪŻ─Ż║²┐žųŲŠ▀ėą▌^ÅŖĄ─¶ö░¶ąįĪóī”▒╗┐žī”Ž¾Ą─ģóöĄ(sh©┤)ūā╗»▓╗├¶ĖąŻ¼│¼š{(di©żo)┴┐ąĪĄ╚ā×(y©Łu)³cĪŻ▒Š╬─īó─Ż║²┐žųŲ┼cé„Įy(t©»ng)PID┐žųŲŽÓĮY║Žæ¬ė├ė┌öĄ(sh©┤)┐žÖC┤▓Ą─╦┼Ę■┐žųŲŽĄĮy(t©»ng)ųąŻ¼═¼Ģrßśī”┐žųŲī”Ž¾Š▀ėąĘŪŠĆąįĪóĢrūāąįĪóļSÖCąįĄ╚╠ž³cŻ¼śŗįņ┴╦ūį▀mæ¬─Ż║²┐žųŲŲ„Ż¼į┌┐žųŲ▀^│╠ųąīŹĢrūįäėš{(di©żo)š¹─Ż║²┐žųŲģóöĄ(sh©┤)Ż¼▓óī”Ųõ▀MąąĘ┬šµ╚ĪĄ├┴╦┴╝║├Ą─┐žųŲą¦╣¹ĪŻ
1 öĄ(sh©┤)┐žÖC┤▓▀MĮo╦┼Ę■ŽĄĮy(t©»ng)┐žųŲ─Żą═Ą─Į©┴ó
ĪĪĪĪöĄ(sh©┤)┐žÖC┤▓═©│Żė╔öĄ(sh©┤)┐žŽĄĮy(t©»ng)Īó╦┼Ę■ļŖÖCĪó╬╗ų├╗“╦┘Č╚é„ĖąŲ„╝░╣żū„┼_Ą╚ĮM│╔ĪŻCNCė├üĒ┤µā”╣ż╝■╝ė╣ż│╠ą“Īó┼cėŗ╦ŃÖC═©ėŹĪó▀MąąĖ„ĘN▓ÕčaŻ¼Ž“Ė„éĆ▌S╦┼Ę■“īäėŲ„░l(f©Ī)│÷┐žųŲ├³Į±ĪŻ╦┼Ę■ļŖÖCĮė╩šCNCĄ─┐žųŲ├³┴Ņ║¾Ż¼┐ņ╦┘ĪóŲĮ╗¼Ą─“īäė╣żū„┼_▀\äėĪŻé„ĖąŲ„═Ļ│╔╦┘Č╚Ę┤üīŹ¼F(xi©żn)ķ]Łh(hu©ón)┐žųŲĪŻŽĄĮy(t©»ng)ĮM│╔╚ńłD1╦∙╩ŠĪŻ
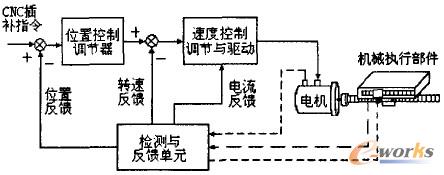
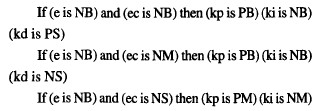
łD1öĄ(sh©┤)┐žÖC┤▓Į╗┴„╦┼Ę■ŽĄĮy(t©»ng)
ĪĪĪĪį┌ęį╣Ō¢┼Īó├}ø_ŠÄ┤aŲ„Ą╚ĮM│╔Öz£yĘ┤üŁh(hu©ón)╣Ø(ji©”)╦∙īŹ¼F(xi©żn)Ą─ķ]Łh(hu©ón)┐žųŲŽ┬Ż¼ļŖäėÖCĄ─▐DĮŪīóĖ·ļSöĄ(sh©┤)┐žųĖ┴Ņūā╗»ĪŻ═©▀^Ė▀Š½Č╚Ą─²X▌åĖ▒║═Š½├▄ĮzĖ▄┬▌─ĖĖ▒é„äėŻ¼ļŖäėÖCĄ─ĮŪ╬╗ęŲ▒╗▐D╗»×ķ╦∙ąĶĄ─╣żū„┼_Ą─ų▒ŠĆ╬╗ęŲĪŻ░čÖCąĄ▓┐Ęų║═ļŖÜŌ▓┐Ęų▀BĮėĮM│╔öĄ(sh©┤)┐žÖC┤▓╬╗ų├╦┼Ę■ŽĄĮy(t©»ng)╚ńłD2╦∙╩ŠĪŻė╔ė┌ÖCąĄé„▀fŁh(hu©ón)╣Ø(ji©”)ī”ŽĄĮy(t©»ng)Ą─ė░ĒæŻ¼’@╚╗Ż¼╚ń╣¹╚į╚╗▓╔ė├│ŻęÄ(gu©®)PIDš¹Č©ĘĮĘ©š{(di©żo)╣Ø(ji©”)ģóöĄ(sh©┤)¤oĘ©ØMūŃ╦┼Ę■ŽĄĮy(t©»ng)Ą─äėæB(t©żi)ąį─▄ę¬Ū¾ĪŻė╔łD2┐╔ų¬Ż¼į┌▌^×ķ╚½├µ┐╝æ]╦┼Ę■ŽĄĮy(t©»ng)Ą─Ė„éĆĮM│╔▓┐ĘųĄ─╠žąį║¾Ż¼ŽĄĮy(t©»ng)é„▀f║»öĄ(sh©┤)╩Ūę╗éĆĦ£■║¾Łh(hu©ón)╣Ø(ji©”)Ą─╬ÕļAŽĄĮy(t©»ng)Ż¼×ķ┴╦蹊┐ĘĮ▒ŃŻ¼īóŲõ▐D╗»×ķŪĘūĶ─ߥ─Č■ļAŽĄĮy(t©»ng)ĪŻ
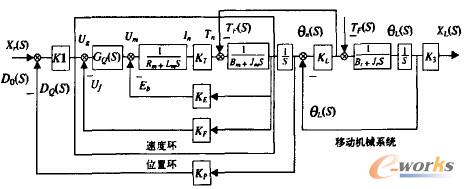
łD2╦┼Ę■▀MĮoŽĄĮy(t©»ng)┐žųŲĮYśŗłD
2 ūį▀mæ¬─Ż║²PID┐žųŲŲ„Ą─įOėŗ
ĪĪĪĪ2.1 ūį▀mæ¬─Ż║²PID┐žųŲŲ„Ą─ŽĄĮy(t©»ng)ĮYśŗ
ĪĪĪĪ─Ż║²ūį▀mæ¬PID┐žųŲŽĄĮy(t©»ng)Ą─ĮYśŗ╚ńłD3╦∙╩ŠĪŻė╔łD┐╔ęŖįōŽĄĮy(t©»ng)ė╔│ŻęÄ(gu©®)PID┐žųŲ║═─Ż║²═Ų└Ē┐žųŲā╔▓┐ĘųĮM│╔Ż¼ęįŲ½▓Ņe║═Ų½▓Ņūā╗»┬╩ecū„×ķ─Ż║²┐žųŲŲ„Ą─▌ö╚ļŻ¼Ė∙ō■(j©┤)─Ż║²┐žųŲęÄ(gu©®)ätī”PIDģóöĄ(sh©┤)▀Mąąūį▀m欚{(di©żo)š¹Ż¼ęįØMūŃ▓╗═¼e║═ecĢrī”┐žųŲģóöĄ(sh©┤)Ą─ę¬Ū¾ĪŻ
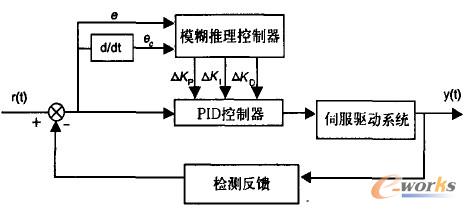
łD3─Ż║²ūį▀mæ¬PID┐žųŲŽĄĮy(t©»ng)Ą─ĮYśŗįŁ└Ē
ĪĪĪĪ2.2 ─Ż║²┐žųŲŲ„Ą─ĮYśŗ
ĪĪĪĪį┌MATLABĄ─├³┴Ņ┤░┐┌ųą▌ö╚ļfuzzyŻ¼│÷¼F(xi©żn)FIS editorĄ─ĮńČ°Ż¼╝┤┐╔į┌┤╦ĘĮ▒ŃĄžŠÄ▌ŗ╦∙ąĶĄ──Ż║²═Ų└ĒŽĄĮy(t©»ng)ĪŻ▀xō±┐žųŲŲ„ŅÉą═×ķMamdanią═Ż¼╚ĪAnd(┼c)Ą─ĘĮĘ©×ķminŻ¼Or(╗“)Ą─ĘĮĘ©×ķmaxŻ¼Implication(═Ų└Ē)Ą─ĘĮĘ©×ķminŻ¼Aggregation(║Ž│╔)Ą─ĘĮĘ©×ķmaxŻ¼Defuzzification(╚ź─Ż║²╗»)Ą─ĘĮĘ©×ķcentroid(ųžą─ŲĮŠ∙Ę©)ĪŻė╔łD3┐╔┐┤│÷įō─Ż║²┐žųŲŲ„ėąā╔▌ö╚ļ(eĪóec)Ż¼╚²▌ö│÷(Ī„KpĪóĪ„KiĪóĪ„Kd)Ż¼┤“ķ_FIS editorĄ─Ž┬└Ł▓╦å╬editŻ¼į┌Add Variableųą▀xČ©▌ö╚ļ▌ö│÷ūā┴┐öĄ(sh©┤)─┐ĪŻ
ĪĪĪĪ2.2.1 ļ`ī┘Č╚║»öĄ(sh©┤)
ĪĪĪĪįO▌ö╚ļ▌ö│÷ūā┴┐Š∙▀xė├╚²ĮŪą╬ļ`ī┘Č╚║»öĄ(sh©┤)Ū·ŠĆŻ¼šōė“×ķ[6Ż¼+6]Ż¼─Ż║²ūė╝»×ķ{žō┤¾Ż¼žōųąŻ¼žōąĪŻ¼┴ŃŻ¼š²ąĪŻ¼š²ųąŻ¼š²┤¾}Ż¼Ęųäeī”æ¬{NBŻ¼NMŻ¼NSŻ¼0Ż¼PSŻ¼PMŻ¼PB}ĪŻļpō¶Ė„▌ö╚ļ▌ö│÷ūā┴┐łDś╦Ż¼┤“ķ_membership function editor(ļ`ī┘Č╚║»öĄ(sh©┤)ŠÄ▌ŗŲ„)╝┤┐╔Ęųäe▀Mąą╔Ž╩÷įOČ©ĪŻ
ĪĪĪĪ2.2.2 ─Ż║²┐žųŲęÄ(gu©®)ät
ĪĪĪĪ═©│ŻŻ¼PID┐žųŲŲ„Ą─┐žųŲ╦Ń╩Į×ķŻ║
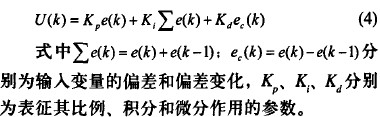
ĪĪĪĪ▒╚└²ŽĄöĄ(sh©┤)KpĄ─ū„ė├į┌ė┌╝ė┐ņŽĄĮy(t©»ng)Ą─Ēææ¬╦┘Č╚Ż¼╠ßĖ▀ŽĄĮy(t©»ng)š{(di©żo)╣Ø(ji©”)Š½Č╚Ż¼KpįĮ┤¾Ż¼Ēææ¬╦┘Č╚įĮ┐ņŻ¼š{(di©żo)╣Ø(ji©”)Š½Č╚įĮĖ▀Ż¼Ą½▀^┤¾īó«a(ch©Żn)╔·│¼š{(di©żo)Ż¼╔§ų┴ī¦ų┬ŽĄĮy(t©»ng)▓╗ĘĆ(w©¦n)Č©ĪŻĘeĘųŽĄöĄ(sh©┤)KiĄ─ū„ė├į┌ė┌Ž¹│²ŽĄĮy(t©»ng)ĘĆ(w©¦n)æB(t©żi)š`▓ŅŻ¼KiįĮ┤¾Ż¼ņo▓ŅŽ¹│²įĮ┐ņŻ¼Ą½▀^┤¾Ģ■«a(ch©Żn)╔·ĘeĘų’¢║═Č°ę²Ų▌^┤¾Ą─│¼š{(di©żo)ĪŻ╬óĘųŽĄöĄ(sh©┤)Kdė░ĒæŽĄĮy(t©»ng)Ą─äėæB(t©żi)╠žąįŻ¼KdįĮ┤¾Ż¼įĮ─▄ęųųŲŲ½▓Ņūā╗»Ż¼Ą½▀^┤¾Ģ■čėķLš{(di©żo)╣Ø(ji©”)Ģrå¢Ż¼ĮĄĄ═┐╣Ė╔ö_─▄┴”ĪŻ
ĪĪĪĪĖ∙ō■(j©┤)ģóöĄ(sh©┤)KpĪóKiĪóKdī”ŽĄĮy(t©»ng)▌ö│÷╠žąįĄ─ė░ĒæŪķørŻ¼┐╔Üw╝{│÷ŽĄĮy(t©»ng)į┌▒╗┐ž▀^│╠ųąī”ė┌▓╗═¼Ą─e║═ecŻ¼ģóöĄ(sh©┤)KpĪóKiĪóKdĄ─ūįš¹Č©įŁätŻ║
ĪĪĪĪ1)«öŻ³eŻ³▌^ąĪĢrŻ¼×ķ╩╣ŽĄĮy(t©»ng)Š▀ėą▌^║├Ą─Ė·█Öąį─▄Ż¼æ¬╚Ī▌^┤¾Ą─K┼c▌^ąĪĄ─Ū╔Ż¼═¼Ģr×ķ▒▄├ŌŽĄĮy(t©»ng)Ēææ¬│÷¼F(xi©żn)▌^┤¾Ą─│¼š{(di©żo)Ż¼æ¬ī”ĘeĘųū„ė├╝ėęįŽ▐ųŲŻ¼═©│Ż╚ĪKi=0ĪŻ
ĪĪĪĪ2)«öŻ³eŻ³║═Ż³ecŻ³×ķųąĄ╚┤¾ąĪĢrŻ¼×ķ╩╣ŽĄĮy(t©»ng)Ēææ¬Ą─│¼š{(di©żo)┴┐£pąĪ║═▒ŻūCę╗Č©Ą─Ēææ¬╦┘Č╚Ż¼Kpæ¬╚ĪąĪę╗ą®ĪŻį┌▀@ĘNŪķørŽ┬Ū╔Ą─╚ĪųĄī”ŽĄĮy(t©»ng)ė░Ēæ║▄┤¾Ż¼æ¬╚ĪąĪę╗ą®Ż¼KiĄ─╚ĪųĄę¬▀m«öĪŻ
ĪĪĪĪ3)«öŻ³eŻ³▌^ąĪĢrŻ¼×ķ┴╦╩╣ŽĄĮy(t©»ng)Š▀ėą▌^║├Ą─ĘĆ(w©¦n)æB(t©żi)ąį─▄Ż¼æ¬į÷┤¾KpĪóKiųĄŻ¼═¼Ģr×ķ▒▄├Ō▌ö│÷Ēææ¬į┌įOČ©ųĄĖĮĮ³š±╩ÄŻ¼ęį╝░┐╝æ]ŽĄĮy(t©»ng)Ą─┐╣Ė╔ö_─▄┴”Ż¼æ¬▀m«ö▀x╚Ī„įŻ¼ŲõįŁät╩ŪŻ║«öŲ½▓Ņūā╗»┬╩▌^ąĪĢrŻ¼Kp╚Ī┤¾ę╗ą®Ż╗«öŲ½▓Ņūā╗»┬╩▌^┤¾ĢrŻ¼Kd╚Ī▌^ąĪĄ─ųĄŻ¼═©│ŻKd×ķųąĄ╚┤¾ąĪĪŻ
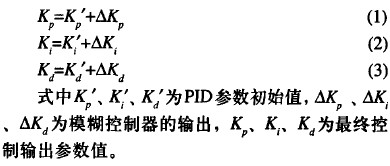
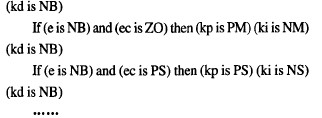
ĪĪĪĪė╔╔Ž╩÷Ęų╬÷┐╔Ą├│÷─Ż║²┐žųŲęÄ(gu©®)ät▒ĒŻ¼į┌editŽ┬Ą─Rules╝┤┐╔▌ö╚ļ─Ż║²┐žųŲęÄ(gu©®)ätŻ¼ą╬╚ńŻ║
ĪĪĪĪų┴┤╦Ż¼Į©┴óŲ├¹×ķnhŻ«fisĄ─╬─╝■Ż¼═Ļ│╔┴╦─Ż║²┐žųŲŲ„ĮYśŗĄ─š¹¾wįOėŗĪŻ
ĪĪĪĪ2.3 Į©┴óFuzzy-PIDŽĄĮy(t©»ng)ĮYśŗĘ┬šµ┐“łD
ĪĪĪĪĖ∙ō■(j©┤)│ŻęÄ(gu©®)Ą─PID┐žųŲŲ„į÷┴┐╦Ń╩ĮĮY║Ž(1)Īó(2)Īó(3)╩ĮŻ¼╝┤┐╔į┌MATLABŻ»SimulinkŁh(hu©ón)Š│Ž┬Į©┴óŲPIDĄ─Ę┬šµūė─ŻēKŻ¼╚ńłD4╦∙╩ŠŻ¼▓óĘŌčb│╔ūėŽĄĮy(t©»ng)PIDSubsystemĪŻ─Ż║²┐žųŲŲ„╝░ŲõĘŌčbĘ┬šµ─ŻēK╚ńłD5╦∙╩ŠĪŻ░č─Ż║²┐žųŲŲ„║═PID┐žųŲŲ„ĘŌčbį┌ę╗ŲŻ¼ĮM│╔Fuzzy—PID┐žųŲŲ„Ż¼╚ńłD6╦∙╩ŠĪŻ
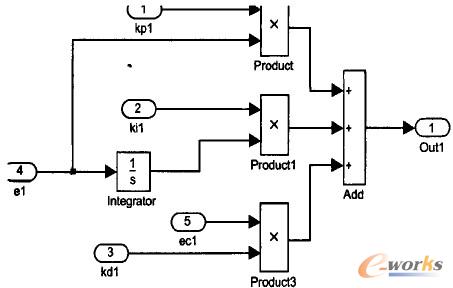
łD4 PIDĘ┬šµūė─ŻēK
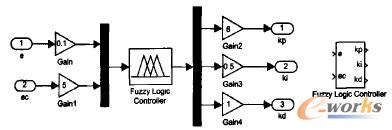
łD5─Ż║²┐žųŲŲ„╝░ŲõĘŌčb
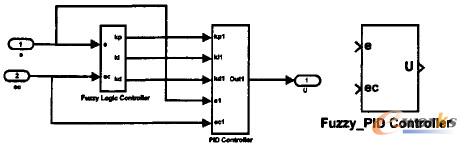
łD6─Ż║²ūį▀mæ¬PID┐žųŲŲ„╝░ŲõĘŌčb
3 ŽĄĮy(t©»ng)Ę┬šµ
ĪĪĪĪ▀xō±─│öĄ(sh©┤)┐žÖC┤▓Ą─zŽ“▀MĮo╦┼Ę■ŽĄĮy(t©»ng)×ķ蹊┐ī”Ž¾Ż¼╣żū„┼_┘|(zh©¼)┴┐m=3500kgŻ¼ĮzĖ▄ī¦│╠L=0.0012mŻ¼ĮzĖ▄┐éķLl=0.963mŻ¼ĮzĖ▄ų¦│ą▌SŽ“äéČ╚KB=1.12*108NŻ»mŻ¼ĮzĖ▄┬▌─ĖĄ─Įėė|äéČ╚KN=2.02*108NŻ»mĪŻ▓╔ė├╬„ķTūėļŖÖCą═╠¢×ķIFKl602Ż¼ļŖÖC▐DäėæT┴┐J=0.01323kg·m2ĪŻĖ∙ō■(j©┤)ęį╔ŽģóöĄ(sh©┤)┤_Č©ÖCļŖ±Ņ║ŽŽĄĮy(t©»ng)Ą─é„▀f║»öĄ(sh©┤)Ż¼Į©┴óŽĄĮy(t©»ng)Ą──Ż║²ūį▀mæ¬PID┐žųŲĄ─SimulinkĘ┬šµėŗ╦ŃłDŻ¼╚ńłD7╦∙╩ŠĪŻ
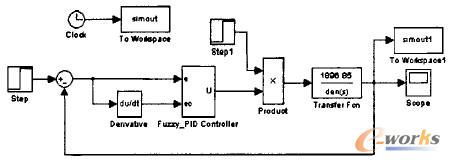
łD7ŽĄĮy(t©»ng)─Ż║²ūį▀mæ¬PID┐žųŲĄ─SimulinkĘ┬šµ
ĪĪĪĪ╚Ī┴┐╗»ę“ūėke=0.2Ż¼kec=0.1Ż¼ĮŌ─Ż║²ę“ūėk1=0.5Ż¼k2=0.01Ż¼k3=0.01Ż¼┴ŅPID┐žųŲŲ„3éĆ│§╩╝ųĄKp'=16.4Ż¼Ki'=0.3Ż¼Kd'=0.5Ż¼Ę┬šµĢrķg40sŻ¼╝ėå╬╬╗ļA▄Są┼╠¢łD6╩Ū│ŻęÄ(gu©®)PID┐žųŲŪ·ŠĆłD║═─Ż║²ūį▀mæ¬PID┐žųŲŪ·ŠĆłDĪŻĘ┬šµĮY╣¹▒Ē├„Ż¼┤╦ĘĮĘ©▌^│ŻęÄ(gu©®)Ą─PID┐žųŲŻ¼ė╔ė┌─Ż║²┐žųŲŲ„─▄ē“Ė∙ō■(j©┤)ŽĄĮy(t©»ng)š`▓Ņe║═eŻ«š`▓Ņūā╗»┬╩ī”╚²éĆģóöĄ(sh©┤)Ī„KpĪóĪ„KiĪóĪ„Kd▀Mąąį┌ŠĆą▐š²Ż¼╦∙ęįĄ├ĄĮĄ─ŽĄĮy(t©»ng)äėæB(t©żi)Ēææ¬Ū·ŠĆ▌^║├Ż¼│¼š{(di©żo)┴┐ąĪŻ¼ĘĆ(w©¦n)æB(t©żi)Š½Č╚Ė▀Ż¼Ė³║├Ą─▀mæ¬ąį║═¶ö░¶ąįĪŻ
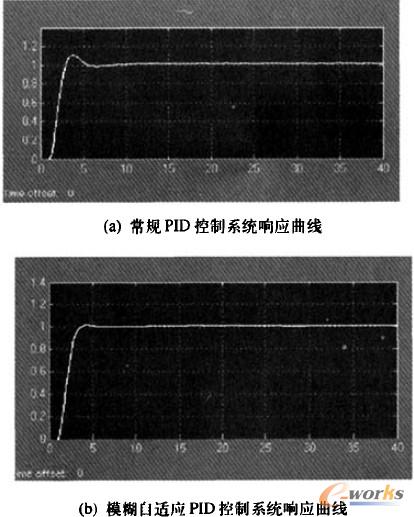
łD8┐žųŲąį─▄▒╚▌^
4 ĮYšō
ĪĪĪĪ▒Š╬─ĮķĮB┴╦╗∙ė┌─Ż║²┐žųŲĄ─╦┼Ę■┐žųŲŽĄĮy(t©»ng)Ą─╗∙▒ŠĮYśŗŻ¼▓óįö╝ÜĘų╬÷┴╦Ė„ĮM│╔▓┐ĘųĄ─ÖC└ĒŻ¼į┌┤╦╗∙ĄA╔ŽŻ¼īó─Ż║²PID┐žųŲæ¬ė├ė┌┐╝æ]ÖCļŖ±Ņ║Žą¦æ¬(░³└©ÖCąĄ▀MĮoŁh(hu©ón)╣Ø(ji©”))Ą─öĄ(sh©┤)┐ž╦┼Ę■ŽĄĮy(t©»ng)ųąŻ¼įō┐žųŲŲ„┐╔ęįĖ∙ō■(j©┤)£y┴┐Ą├ĄĮĄ─Ų½▓Ņ╝░Ų½▓ŅĄ─ūā╗»┬╩Ż¼į┌ŠĆūįäėš¹Č©PID┐žųŲŲ„Ą─3éĆģóöĄ(sh©┤)Ż¼▓óį┌MATLABŁh(hu©ón)Š│Ž┬▀Mąą┴╦Ę┬šµŻ¼Ę┬šµ╝░īŹ“×ĮY╣¹▒Ē├„Ż¼ūį▀mæ¬─Ż║²╬╗ų├┐žųŲŲ„Š▀ėą┴╝║├Ą─ĘĆ(w©¦n)æB(t©żi)Š½Č╚║═äėæB(t©żi)Ēææ¬ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮy(t©»ng)ŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śI(y©©)äšŅIė“ĪóąąśI(y©©)æ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śI(y©©)äš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśI(y©©)äšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śI(y©©)ĻPūóERP╣▄└ĒŽĄĮy(t©»ng)Ą─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śI(y©©)ą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠW(w©Żng)http://m.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║─Ż║²ūį▀mæ¬PIDį┌öĄ(sh©┤)┐ž▀MĮo╦┼Ę■ŽĄĮy(t©»ng)Ą─æ¬ė├
▒Š╬─ŠW(w©Żng)ųĘŻ║http://m.hanmeixuan.com/html/consultation/1083939957.html



▀xą═ųąą─")
¾w“×ųąą─")
«a(ch©Żn)ŲĘ┘Å┘I")
æ(zh©żn)┬į║Žū„")