0 Ū░čį
į┌Ų¹▄ćŪ░Č╦─ŻēKĄ─ķ_░lųąŻ¼ōQ¤ß─ŻēKĄ─═©’L┴┐║═’L╦┘Ęų▓╝ī”ōQ¤ß─ŻēKĄ─ōQ¤ßą¦┬╩ėąų°ųžę¬Ą─ė░ĒæŻ¼ę“┤╦╚ń║╬£╩┤_ĄžĄ├ĄĮŪ░Č╦─ŻēKį┌Ė„ĘN╣żørŽ┬Ą─═©’L┴┐║═’L╦┘Ęų▓╝’@Ą├ė╚×ķųžę¬ĪŻ─┐Ū░ų„ꬥ─ĘĮĘ©ėą£yįćĘ©║═─ŻöMĘ©Ż¼ė╔ė┌£yįćĘ©ų▄Ų┌ķL┘Mė├Ė▀Ż¼Č°─ŻöMĘ©Š▀ėąų▄Ų┌Č╠╗©┘M╔┘┐╔ęįį┌ķ_░lĄ─įńŲ┌Įķ╚ļĄ╚ā׳cŻ¼¼Fį┌įĮüĒįĮČÓĄ─ų„ÖCÅSķ_╩╝╩╣ė├─ŻöMĘ©üĒ▌oų·Ū░Č╦─ŻēKĄ─ķ_░lĪŻ
─ŻöMĘ©ų„ę¬╩╣ė├CFD(Computational Fluid Dynamics)Ą─Ęų╬÷ĘĮĘ©Ż¼ļSų°ėŗ╦ŃÖC╝╝ągĄ─░lš╣Ż¼į┌š¹▄ćķ_░l▀^│╠ųąCFD▒╗ė├ė┌Ū░┼ō┴„ł÷Īóš¹▄ć£žČ╚ł÷Īó’LūĶĪó’Lįļ┬ĢĪóHVACĄ╚įSČÓĘĮ├µĪŻį┌Ų¹▄ćŪ░Č╦─ŻēKųą╔ó¤ß’L╔╚╩Ūę╗éĆĻPµI▓┐╝■Ż¼╔ó¤ß’L╔╚į┌╣żū„Ģrūį╔Ē╠Äė┌Ė▀╦┘ą²▐DĀŅæBŻ¼×ķ└õģsŽĄĮy║═┐šš{ŽĄĮyęį╝░ųą└õŽĄĮyĄ─╔ó¤ß╠ß╣®äė┴”Ż¼ę“┤╦’L╔╚─Żą═Ą─£╩┤_│╠Č╚ī”ūŅĮKĄ──ŻöMĮY╣¹ėą║▄┤¾Ą─ė░ĒæĪŻ
─┐Ū░ėą╚²ĘNĘĮĘ©┐╔ęįī”’L╔╚▀Mąą─ŻöMŻ║MRF─Żą═Īó’L╔╚äė┴┐į┤─Żą═Īó╦▓æB─ŻöMĪŻ▀@╚²ĘNĘĮĘ©Ė„ėąā×╚▒³cŻ¼MRF║═’L╔╚äė┴┐į┤Č╝╩ŪĘĆæBĄ─ĘĮĘ©Ż¼ŽÓ▌^ė┌╦▓æBĄ─ĘĮĘ©Ż¼ĘĆæBĄ─ĘĮĘ©ėŗ╦Ń┴┐▌^ąĪŻ¼Č°╦▓æBĘĮĘ©ėąų°Ė³Ė▀Ą─Ū¾ĮŌŠ½Č╚ĪŻMRF─Żą═ąĶę¬╔╚╚~Ą─CADöĄō■Ż¼▀@ĘN─Żą═▒╗▌^ČÓĄžė├ė┌Ū░┼ō┴„ł÷Ęų╬÷ųąĪŻäė┴┐į┤─Żą═ät▓╗ę¬╔╚╚~Ą─CADöĄō■Ż¼į┌ø]ėą╔╚╚~öĄō■Ą─ŪķørŽ┬▀@ĘN─Żą═▒╗▌^ČÓĄž╩╣ė├ĪŻ╦▓æB─ŻöMų„ę¬ėą╗¼ęŲŠWĖ±(SlidingMesh)Ę©Ż¼ė╔ė┌╦▓æBėŗ╦ŃąĶę¬┤¾┴┐Ą─ėŗ╦Ń┘Yį┤Ż¼─┐Ū░▀@ę╗ĘĮĘ©║▄╔┘į┌Ū░┼ō┴„ł÷Ęų╬÷╩╣ė├ĪŻ
─┐Ū░ėą▌^ČÓĄ─╬─š┬蹊┐┴╦MRF─Żą═─ŻöM’L╔╚å╬¾wĄ─Š½Č╚Ż¼Ųõųą╬─š┬[1]ųĖ│÷MRFī”ą²▐Dė“┤¾ąĪ║▄├¶ĖąŻ¼ą²▐Dė“įĮ┤¾ėŗ╦ŃĄ─═©’L┴┐įĮ┤¾Ż╗╬─š┬[2-4]Ęųäe蹊┐┴╦MRF─Żą═║═╗¼ęŲŠWĖ±─Żą═Ą─Š½Č╚Ż¼ųĖ│÷MRF─Żą═Ą─š`▓Ņ×ķ10%ū¾ėęŻ╗╬─š┬[5]蹊┐┴╦’L╔╚šųī”’L╔╚å╬¾wąį─▄Ą─ė░ĒæŻ¼ėą¤o’L╔╚šųī”─ŻöMĄ─ĮY╣¹ėą▌^┤¾ė░ĒæĪŻ▒Š╬─ų„ę¬čąŠ┐MRF─Żą═▀\ė├ĄĮš¹▄ć║¾Ą─Š½Č╚ĪŻ
1 └Ēšō╗∙ĄA
MRF─Żą═▀mė├ė┌ī”ą²▐Då¢Ņ}Ą──ŻöMĪŻ▀@ĘNĘĮĘ©ų„ę¬╩Ūīó┴„¾wė“Ęų×ķą²▐Dė“║═ĘŪą²▐Dė“Ż¼į┌ĘŪą²▐Dė“ųąŪ¾ĮŌ│ŻęÄĄ─┴„¾w┐žųŲĘĮ│╠Ż¼Č°į┌ą²▐Dė“ųąŪ¾ĮŌ═©▀^ū°ś╦▌S▐DōQĄ├ĄĮĄ─ą┬Ą─┐žųŲĘĮ│╠Ż║ν=νr+ω×r
═©▀^╔Ž├µĄ─▐DōQ▒Ń┐╔ęįīóą²▐D╝ė╦┘Č╚╝ė╚ļĄĮäė┴┐ĘĮ│╠ųąĪŻ
MRF─Żą═▀mė├ė┌ĘĆæB▀^│╠Ą─Ū¾ĮŌŻ¼╦³ę¬Ū¾ļxķ_ą²▐Dė“Ą─┴„ł÷▒žĒÜčžą²▐D▌Sī”ĘQŻ¼╚ń╣¹▓╗ØMūŃ╔Ž╩÷╩╣ė├ę¬Ū¾─ŻöMĮY╣¹┐╔─▄Ģ■│÷¼Fę╗Č©Ą─Ų½▓ŅĪŻī”ė┌’L╔╚Ą──ŻöMę¬Ū¾ą²▐Dė“ę¬▒M┐╔─▄Ą─┤¾Ż¼┴Ē═Ō┐┐Į³ą²▐Dė“Ą─ĘŪą²▐D▒┌├µę▓▒žĒÜ╩Ūčžą²▐D▌Sī”ĘQĄ─ĪŻŪ░Č╦─ŻēK▓╗─▄═Ļ╚½ØMūŃ╔Ž╩÷ę¬Ū¾Ą─Ż¼ę“×ķ┐┐Į³’L╔╚Ą─’L╔╚šų▓╗╩Ū═Ļ╚½▌Sī”ĘQĄ─ĪŻ
2 įć“×║═öĄųĄĘĮĘ©
×ķ┴╦蹊┐Ū░┼ō┴„ł÷Ęų╬÷ųą MRF ─Żą═Ą─Š½Č╚Ż¼ąĶę¬┼cįć“×ĮY╣¹▀Mąąī”▒╚ĪŻČ°ī”ė┌Ų¹▄ćüĒšfŪ░Č╦─ŻēKĄ─┴„æB▌^ļy═©▀^įć“ץ─ĘĮĘ©Ą├ĄĮĪŻ─┐Ū░ę╗éĆ┐╔ąąĄ─ĘĮĘ©╩Ū£yįć’L╔╚Ū░ōQ¤ßŲ„Ą─═©’L┴┐Ęų▓╝Ż¼═©▀^ī”▒╚ōQ¤ßŲ„Ą─═©’L┴┐üĒ┤_Č©MRF─Żą═Ą─Š½Č╚ĪŻ
2.1 įć“×ĘĮĘ©
įć“×ī”Ž¾×ķę╗┐Ņ╚²Ä¹▐I▄ćŻ¼įō▄ćą═░läėÖC×ķūį╚╗╬³ÜŌą═Ż¼Ųõ╔ó¤ß’L╔╚▓╔ė├å╬’L╔╚Ą─ą╬╩ĮĪŻįć“×Ū░īó╚~▌å╩Į’L╦┘é„ĖąŲ„▓╝ų├ė┌└õ─²Ų„║¾(╚ńłD1╦∙╩Š)Ż¼┴Ē═Ō×ķĄ├ĄĮ’L╔╚Ą─▐D╦┘Ż¼į┌’L╔╚╔Ž▓╝ų├┴╦▐D╦┘é„ĖąŲ„ĪŻ
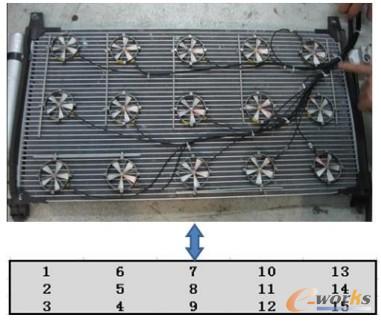
łD1 └õ─²Ų„║¾é„ĖąŲ„▓╝³cĘų▓╝łD
įć“×ųą’L╔╚ė╔═ŌĮėĘĆē║ļŖį┤“īäėŻ¼┐é╣▓▀Mąą┴╦3ĮM£yįćŻ║’L╔╚▓╗╝ėļŖĪóĄ═ļŖē║ĪóĖ▀ļŖē║Ż¼├┐ĮM£yįć░³║¼Ų¹▄ćÅ─ĄĪ╦┘ĄĮśO╦┘ąą±é▀^│╠ųąĄ─ę╗ą®╣żør³cŻ¼╩╣įć“×Ė▓╔w▄ć▌v│ŻęŖĄ─ąą±é╣żørĪŻ×ķ▒ŻūCūŃē“Ą─£yįćŠ½Č╚Ż¼įć“×į┌═¼Ø·┤¾īWŁhŠ│’LČ┤ųą▀MąąĪŻ
2.2 öĄųĄĘĮĘ©
2.2.1 CFD─Żą═
═©▀^STAR-CCM+│╔╩ņĄ─░³├µ╝╝ągĮ©┴óš¹▄ć─Żą═ĪŻė╔ė┌▒Š┤╬Ęų╬÷ų°ųžčąŠ┐Ū░Č╦─ŻēKŻ¼×ķĖ³║├Ą─▒Ż┴¶ę╗ą®CAD╝Ü╣ØŻ¼╚ń▀MÜŌĖ±¢┼ĪóŪ░Č╦─ŻēKĄ╚ī”─ŻöMĮY╣¹ė░Ēæ▌^┤¾Ą─▓┐╝■ų▒Įėį┌Ū░╠Ä└Ē▄ø╝■HyperMeshųą▀Mąą╠Ä└Ē(╚ńłD2╦∙╩Š)ĪŻ
łD2 HyperMesh╠Ä└ĒĄ─Ū░Č╦─ŻēKĄ─ŠWĖ±
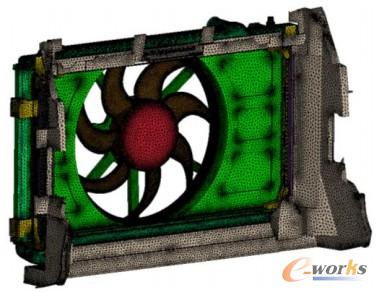
▒Š╬─ų„ę¬┐╝æ]ā╔ĘNę“╦žī” MRF ─Żą═─ŻöMŠ½Č╚Ą─ė░ĒæŻ¼Ą┌ę╗ĘNę“╦ž╩Ūą²▐Dė“Ą─┤¾ąĪŻ¼┴Ēę╗ĘNę“╦ž╩ŪŠWĖ±├▄Č╚ĪŻ×ķ“×ūC’L╔╚ą²▐Dė“Ą─┤¾ąĪī”ėŗ╦ŃĮY╣¹Ą─ė░ĒæŻ¼įOėŗ┴╦ā╔ĘN▓╗═¼┤¾ąĪĄ─ą²▐Dė“ĪŻĄ┌ę╗ĘNą²▐Dė“Ą─é╚├µ╚Īį┌’L╔╚šųĄ─ā╚é╚Ż¼Č°▀M│÷┐┌╚Īį┌┐╔ęįš¹¾w░³╣³ūĪ╔╚╚~Ą─╬╗ų├Ż¼▀@╩Ūę╗ĘN░ļÅĮūŅ┤¾Ą─ą²▐Dė“╚ĪĘ©Ż╗Ą┌Č■ĘNą²▐Dė“Ą─é╚├µät╚Īį┌’L╔╚šų║═╔╚╚~ų«ķgŻ¼Č°▀M│÷┐┌╚Īį┌╔╚╚~▐D▌SĄ─ų▒ŠĆČ╬╔Ž(╚ńłD3╦∙╩Š)ĪŻ
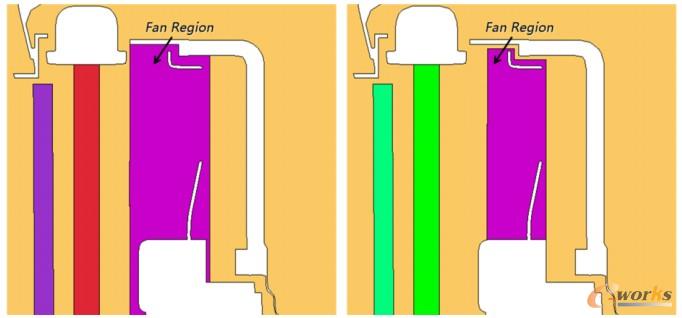
łD3 ā╔ĘN’L╔╚ą²▐Dė“╩ŠęŌłD(ū¾łD×ķą²▐Dė“ę╗Ż¼ėęłD×ķą²▐Dė“Č■)
¾wŠWĖ±▓╔ė├TrimmerŠWĖ±Ż¼│§╩╝─Żą═Ą─¾wŠWĖ±öĄ┴┐×ķ1200╚fū¾ėęĪŻ×ķ▒╚▌^▓╗═¼ŠWĖ±├▄Č╚ī”ėŗ╦ŃĮY╣¹ė░ĒæŻ¼į┌│§╩╝─Żą═Ą─╗∙ĄA╔Žī”ŠWĖ±▀Mąą┴╦╝ė├▄Ż¼╝ė├▄Ą─ų„ę¬ģ^ė“×ķŪ░Č╦─ŻēKų▄ć·ĪóĖ±¢┼Ū░ĄĮ’L╔╚║¾Īó░läėÖC┼ōĄ╚▓┐╬╗Ż¼╝ė├▄║¾ŠWĖ±öĄ┴┐×ķ2300╚fū¾ėę(╚ńłD4╦∙╩Š)ĪŻ
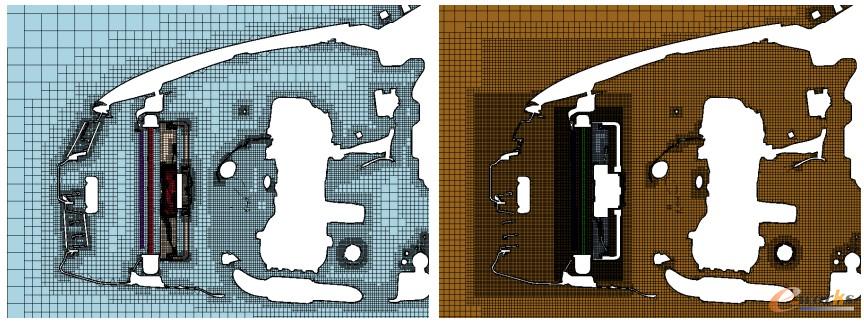
łD4 ā╔ĘN├▄Č╚Ą─¾wŠWĖ±╩ŠęŌłD(ū¾łD×ķ│§╩╝ŠWĖ±Ż¼ėęłD×ķ╝ė├▄ŠWĖ±)
▒Š╬─ų„ę¬▀Mąą╚²ĘNĘĮ░ĖĄ─蹊┐Ż║ĘĮ░Ėę╗×ķ│§╩╝ŠWĖ±+ą²▐Dė“ę╗ĪóĘĮ░ĖČ■×ķ╝ė├▄ŠWĖ±+ą²▐Dė“ę╗ĪóĘĮ░Ė╚²×ķ╝ė├▄ŠWĖ±+ą²▐Dė“Č■ĪŻ
2.2.2 ╬’└Ē─Żą═║═▀ģĮńŚl╝■
─ŻöM×ķĘĆæB▀^│╠Ż¼▓╔ė├╚²ŠS▓╗┐╔ē║Ą─Reynolds-averaged Navier StokesĘĮ│╠║═Č■ļAėŁ’LĄ─ļx╔ó╦ŃĘ©Ż¼═─┴„─Żą═╩╣ė├Realizable K-Epsilon─Żą═Ż¼Į³▒┌├µ╩╣ė├Two-Layer All y+ Wall TreatmentĪŻ▀ģĮńŚl╝■×ķ╦┘Č╚▀M┐┌▀ģĮń║═ē║┴”│÷┐┌▀ģĮńĪŻŲõųą└õ─²Ų„║═╔ó¤ßŲ„▓╔ė├ČÓ┐ūĮķ┘|─Żą═Ż¼ČÓ┐ūĮķ┘|─Żą═╦∙ąĶĄ─æTąįūĶ─ߎĄöĄ║═š│ąįūĶ─ߎĄöĄ═©▀^å╬¾w£yįćöĄō■öM║ŽĄ├ĄĮĪŻ’L╔╚╩╣ė├MRF─Żą═Ż¼═¼Ģr╩╣ė├MixingPlane─Żą═Ż¼’L╔╚▐D╦┘┼cįć“×ę╗ų┬ĪŻ
3 Ę┬šµĮY╣¹
3.1 Ę┬šµĮY╣¹╠Ä└Ē
ė╔ė┌£yįćĢr╩╣ė├Ą─╩Ū╚~▌å╩Į’L╦┘é„ĖąŲ„Ż¼ų╗─▄Ą├ĄĮĖ„éĆ£y³cĄ─ŲĮŠ∙’L╦┘║═┐éĄ─ŲĮŠ∙’L╦┘ĪŻ×ķ┴╦Ė³║├Ą─┼cįć“×▀Mąąī”▒╚Ż¼ąĶę¬į┌ŽÓæ¬Ą─£y³c╬╗ų├╔ŽĮ©┴óę╗éĆ▌oų·├µŻ¼Ūę▌oų·├µ▒žĒÜ┼c╚~▌å╩Įé„ĖąŲ„Ą─┤¾ąĪ╬╗ų├Č╝▒Ż│ųę╗ų┬ĪŻė╔ė┌£y³c▌^ČÓŻ¼┐╔ęįĮĶų·JAVA─_▒ŠüĒ£pąĪ║¾╠Ä└ĒĄ─Ģrķg(╚ńłD5╦∙╩Š)ĪŻ
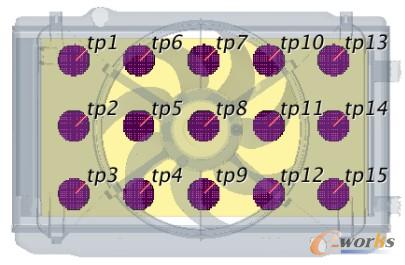
łD5 ▌oų·├µ╩ŠęŌłD
3.2 Ę┬šµĮY╣¹┼c£yįćĮY╣¹ī”▒╚
╚²ĘNĘĮ░ĖĄ─Ė„£y³cŲĮŠ∙’L╦┘┼c£yįćöĄō■Ą─ī”▒╚╚ńłD6╦∙╩ŠŻ║
łD6 Ė„£y³c┼c£yįćöĄō■ī”▒╚ų∙ĀŅłD
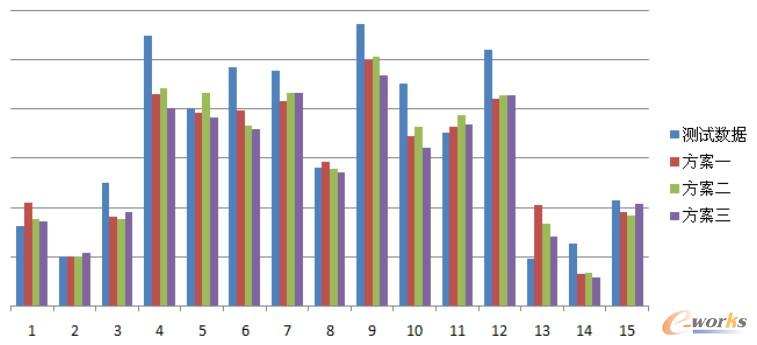
═©’L┴┐š`▓Ņ┐╔ęįė├Ė„ĘĮ░Ė┐éĄ─ŲĮŠ∙’L╦┘š`▓ŅüĒ▒Ēš„Ż¼Č°’L╦┘Ęų▓╝Ą─š`▓Ņ┐╔ęįė├Ė„£y³cš`▓ŅŲĮĘĮ║═Ą─╦ŃöĄŲĮĘĮĖ∙(RMS)üĒ▒Ēš„ĪŻ╚²ĘNĘĮ░ĖĄ─ŲĮŠ∙’L╦┘š`▓Ņ║═RMSī”▒╚╚ńłD7╦∙╩ŠĪŻ
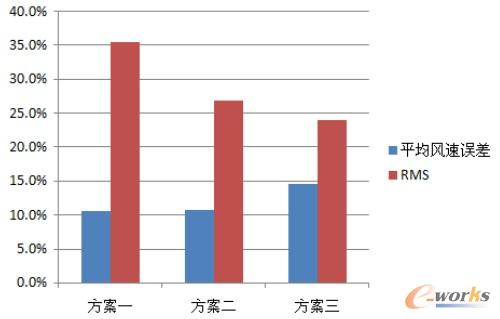
łD7 Ė„£y³c┼c£yįćöĄō■ī”▒╚ų∙ĀŅłD
ė╔łD7┐╔ęį┐┤│÷Ż¼ī”▒╚ĘĮ░Ėę╗║═ĘĮ░ĖČ■Ż¼ā╔š▀Ą─ŲĮŠ∙’L╦┘š`▓Ņ▌^×ķĮėĮ³Ż¼Ą½╩ŪRMSŽÓ▓Ņ▌^┤¾Ż¼▒Ē├„ŠWĖ±├▄Č╚ī”─ŻöM’L╔╚Ą─P-Qąį─▄ė░Ēæ▌^ąĪŻ¼Ą½╩Ūī”’L╦┘Ęų▓╝ėąę╗Č©Ą─ė░ĒæŻ╗ī”▒╚ĘĮ░ĖČ■║═ĘĮ░Ė╚²Ż¼ā╔š▀Ą─ŲĮŠ∙’L╦┘š`▓Ņėą▌^×ķ├„’@Ą─▓Ņ«ÉŻ¼šf├„’L╔╚ģ^ą²▐Dė“Ą─┤¾ąĪī”─ŻöM’L╔╚Ą─P-Qąį─▄ėą▌^┤¾Ą─ė░ĒæŻ¼Č°ā╔š▀RMSŽÓ▓Ņ▌^ąĪŻ¼šf├„ą²▐Dė“Ą─┤¾ąĪī”’L╦┘Ęų▓╝ė░Ēæ▌^ąĪĪŻ
ĘĮ░Ėę╗║═ĘĮ░ĖČ■╦∙╩╣ė├Ą─╩Ū▌^┤¾Ą─ą²▐Dė“Ż¼ė╔ė┌Ųõé╚├µ░³║¼┴╦’L╔╚šųĄ─ā╚▒┌├µŻ¼▒┌├µĢ■ļSų°MRFą²▐Dė“Č°▐DäėŻ¼ę“┤╦į┌▒┌├µ╠ÄĄ─╦┘Č╚Ęų▓╝▌^└ĒšōŪķørĢ■│÷¼F├„’@Ą─Ų½▓ŅŻ¼└Ēšō╔Žį┌ņoų╣Ą─▒┌├µ╔ŽĄ─╦┘Č╚×ķ┴ŃĪŻī”ė┌ĘĮ░Ė╚²╦∙╩╣ė├Ą─ąĪĄ─ą²▐Dė“Ż¼Ųõé╚├µ╚Īį┌’L╔╚šųā╚▒┌║═╔╚╚~ūo’L╚”ų«ķgŻ¼’L╔╚šųā╚▒┌▓╗į┌ą²▐Dė“ā╚Ż¼Ųõ▒┌├µ╦┘Č╚Ą─Ęų▓╝Ę¹║Ž└ĒšōŪķørŻ¼╚ńłD8╦∙╩ŠĪŻ
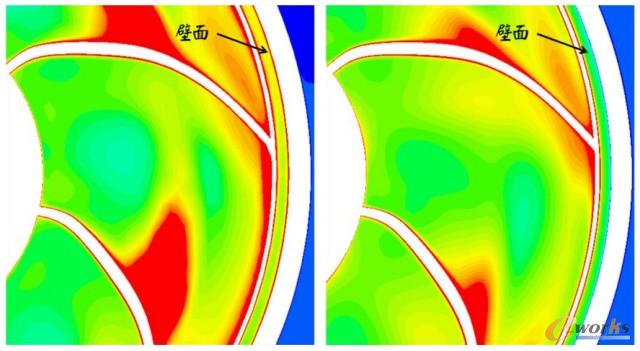
łD8 ā╔ĘN┤¾ąĪą²▐Dė“Ūą├µ╦┘Č╚įŲłD
┐é¾wüĒšf╩╣ė├MRF─Żą═─ŻöMŲ¹▄ćŪ░Č╦─ŻēKĄ─═©’L┴┐║═’L╦┘Ęų▓╝Ģ■«a╔·ę╗Č©Ą─š`▓ŅŻ¼MRF─Żą═Ą─ėŗ╦ŃĮY╣¹Ą═ė┌£yįćĮY╣¹Ż¼═©’L┴┐Ą─š`▓Ņį┌11%ū¾ėęĪŻ
4 ĮYšō
═©▀^▒Š╬─Ą─蹊┐┐╔ęį┐┤ĄĮŻ¼MRF─Żą═ī”ą²▐Dė“Ą─┤¾ąĪĘŪ│Ż├¶ĖąŻ¼╩╣ė├▌^┤¾Ą─ą²▐Dė“┐╔ęįĄ├ĄĮ▒╚▌^┤¾Ą─═©’L┴┐ĪŻį┌▀x╚Īą²▐Dė“Ą─Ģr║“▓╗ę¬īóą²▐Dė“Ą─é╚├µ▀xį┌’L╔╚šųĄ─ā╚▒┌├µ╔ŽŻ¼─ŪśėĢ■įņ│╔’L╔╚šų▒┌├µ╔Ž╦┘Č╚Ęų▓╝Ą─Õeš`ĪŻ┴Ē═ŌŠWĖ±Ą─├▄Č╚ī”═©’L┴┐Ą─┤¾ąĪė░Ēæ▌^ąĪŻ¼Ą½╩Ūī”’L╦┘Ęų▓╝ėąę╗Č©ė░ĒæĪŻMRF─Żą═ī”═©’L┴┐║═╦┘Č╚Ęų▓╝Ą─ŅA£y┼cįć“×ėąę╗Č©Ą─Ų½▓ŅŻ¼═©’L┴┐Ą─š`▓Ņį┌11%ū¾ėęŻ¼▀@ę╗š`▓Ņ┼cŪ░╬─╠ߥĮĄ─蹊┐’L╔╚å╬¾wĄ─šō╬─ųą╦∙Ą├│÷Ą─MRFŠ½Č╚ŽÓę╗ų┬ĪŻŠC╔Ž╦∙╩÷Ż¼į┌Ų¹▄ćŪ░┼ō┴„ł÷Ęų╬÷ųąŻ¼MRF─Żą═ŅA£yĄ─═©’L┴┐┼cįć“×£yįćĮY╣¹ėąę╗Č©Ų½▓ŅŻ¼ę“┤╦ė├įō═©’L┴┐╚źąŻ║╦ōQ¤ßŲ„ąį─▄ätę¬┐╝æ]ŽÓæ¬Ą─š`▓Ņ╦∙«a╔·Ą─ė░ĒæĪŻ
5 Ž┬ę╗▓Į╣żū„
ė╔ė┌MRF─Żą═Ą─Š½Č╚┤µį┌ę╗Č©Ą─å¢Ņ}Ż¼Ž┬ę╗▓ĮąĶę¬└^└m“×ūC▓╗═¼┤¾ąĪĄ─ą²▐Dė“ī”─ŻöMŠ½Č╚Ą─ė░ĒæŻ¼šęĄĮę╗éĆ▌^×ķ║Ž└ĒĄ─ą²▐Dė“Ż╗┴Ē═ŌąĶꬓ×ūCŲõ╦³’L╔╚─Żą═Ż¼╚ń’L╔╚į┤─Żą═║═╦▓æB─ŻöMĄ╚ĘĮĘ©Ą─ėŗ╦ŃŠ½Č╚Ż¼ęįĄ├ĄĮę╗ĘN▌^×ķŠ½┤_Ą─Ū░Č╦─ŻēK═©’L┴┐║═╦┘Č╚Ęų▓╝Ą──ŻöMĘĮĘ©ĪŻ
ģó┐╝╬─½I
[1] Allan Wang, Zhihui Xiao et.al. Evaluation of the Multiple Reference Frame (MRF) Model in a Truck Fan Simulation. SAE, 2005-01-2067
[2] P. Gullberg et.al. A Correction Method for Stationary Fan CFD MRF Models. SAE, 2009-01-0178
[3] P. Gullberg et.al. An Investigation and Correction Method for Stationary Fan CFD MRF Models. SAE, 2009-01-3067
[4] P. Gullberg et.al. Continued Study of the Error and Consistency of Fan CFD MRF Models. SAE, 2010-01-0553
[5] Yuji Kobayashi, Itsuhei Kohri et.al. Study of Influence of MRF Method on the Prediction of the Engine Cooling Fan Performance. SAE, 2011-01-0648
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║Ų¹▄ćŪ░Č╦’L┴┐Ęų╬÷Š½Č╚蹊┐
▒Š╬─ŠWųĘŻ║http://m.hanmeixuan.com/html/solutions/14019311982.html