0 ę²čį
TRIZ╩Ū“░l├„å¢Ņ}ĮŌøQ└Ēšō”Ą─ČĒ╬─║åĘQĪŻ╦³Ą─ų„ę¬─┐Ą─╩Ū蹊┐╚╦ŅÉ▀Mąą░l├„äōįņĪóĮŌøQ╝╝ągļyŅ}▀^│╠ųą╦∙ū±čŁĄ─┐ŲīWįŁ└Ē║═Ę©ätŻ╗╦³╩Ūę╗ĘNĮ©┴óį┌╝╝ągŽĄĮy▀M╗»ęÄ┬╔╗∙ĄA╔ŽĄ─å¢Ņ}ĮŌøQŽĄĮyĪŻTRIZ▒Ē├µĄ─ęŌ╦╝╩ŪÅŖš{ĮŌøQīŹļHå¢Ņ}Ż¼╠žäe╩Ū░l├„å¢Ņ}Ż¼ļ[║¼Ą─ęŌ╦╝╩Ūė╔ĮŌøQ░l├„å¢Ņ}Č°ūŅĮKīŹ¼F(╝╝ąg║═╣▄└Ē)äōą┬ĪŻ
20╩└╝o90─Ļ┤·ęįüĒŻ¼ÖCŲ„╚╦╝╝ągĄ─æ¬ė├ķ_╩╝Å─ųŲįņŅIė“öU│õĄĮĘŪųŲįņ(▒╚╚ńėŅųµ╠Į£yĪó║ŻĄū╠Į▓ņĪó╣▄Ą└õüįO║═Özą▐Īóßt»¤Īó▄Ŗė├ĪóŖ╩śĘĄ╚)ŅIė“Ż¼ę“Č°Ż¼╚╦éāī”ė┌ÖCŲ„╚╦Ą─ąį─▄╠ß│÷┴╦Ė³Ė▀Ą─ę¬Ū¾Ż╗Å─Č°╗∙ė┌ĘŪĮYśŗŁhŠ│ĪóśOŽ▐ŁhŠ│Ž┬Ą─Ž╚▀M║═╠žĘNÖCŲ„╚╦╝╝ąg╝░æ¬ė├蹊┐ęč│╔×ķÖCŲ„╚╦╝╝ąg蹊┐║═░lš╣Ą─ų„ę¬ĘĮŽ“ĪŻĄžŪ“╔·╬’į┌35ā|─ĻĄ─▀M╗»▀^│╠ųąŻ¼░lš╣│÷üĒĄ─ņ`Ū╔Ą─▀\äėÖCśŗ║═ÖC├¶Ą─▀\äė─Ż╩ĮŻ¼▒Ń│╔×ķÖCŲ„╚╦╝╝ągäōą┬░lš╣Ą─üĒį┤ĪŻ
1 TRIZ└Ēšōø_═╗ŠžĻć
TRIZ╠ß│÷ė├39éĆ═©ė├╣ż│╠ģóöĄüĒ├Ķ╩÷ø_═╗Ż¼ė├40Śl░l├„äōįņįŁ└ĒüĒųĖī¦įOėŗ╚╦åTĄ─äōą┬įOėŗĪŻ▓óŪęīó39éĆ╣ż│╠ģóöĄ┼c40Śl░l├„įŁ└ĒĮ©┴óī”æ¬ĻPŽĄŻ¼įOėŗ┴╦ø_═╗ŠžĻćĪŻø_═╗ŠžĻćĄ┌ę╗ąą╩ŪąĶę¬Ė─▀MĄ─39éĆ╝╝ągģóöĄŻ¼╝┤É║╗»ģóöĄŻ╗ŠžĻćĄ┌ę╗┴ą×ķę²ŲÉ║╗»Ą─39éĆ╝╝ągģóöĄŻ¼╝┤ā×╗»ģóöĄĪŻø_═╗ŠžĻćĄ─ąą┼c┴ąĮ╗▓µŠ═ą╬│╔┴╦ŽĄĮyĄ─╝╝ągø_═╗Ż¼į┌ŠžĻćĮ╗▓µĄ─ĘĮĖ±└’Ż¼┴ąīæ│÷┴╦TRIZ═Ų╦]╩╣ė├Ą─░l├„äōįņįŁ└Ēą“╠¢ĪŻ«ö├µī”īŹļHå¢Ņ}ĢrŻ¼šę│÷ŽĄĮyĄ─ø_═╗ģóöĄŻ¼į┌ø_═╗ŠžĻćųąšęĄĮ╦³éāĄ─Į╗▓µ³cŻ¼Š═─▄Ą├ĄĮĮŌøQå¢Ņ}Ą─═Ų╦]░l├„įŁ└ĒĪŻTRIZųąĄ─╝╝ąg├¼Č▄ĮŌŅ}┴„│╠Ż¼╚ńłD1╦∙╩ŠĪŻ

łD1 ╝╝ągø_═╗ĮŌŅ}┴„│╠
2 TRIZ└Ēšōį┌╬óą═╠Į£yÖCŲ„╚╦äōą┬įOėŗųąĄ─æ¬ė├
ė├TRIZĄ─39éĆ═©ė├╣ż│╠ģóöĄīó╔Ž╩÷ø_═╗ŠžĻć│ķŽ¾│╔ę╗░Ńå¢Ņ}Ą─├Ķ╩÷ĪŻ
2.1 ŽŻ═¹Ė─╔ŲĄ─ģóöĄ╚ńŽ┬
1Ż®╬óą═╠Į£yÖCŲ„╚╦š¹¾wĮYśŗįOėŗæ¬įōŠo£É║Ž└ĒŻ¼▓óŪę║åå╬ĪŻ▀^ė┌Å═ļsĄ─ĮYśŗįOėŗĢ■ė░ĒæŽĄĮyĄ─═Ļš¹ąįęį╝░ŽĄĮyĖ„▓┐Ęųų«ķgĄ─ĻPŽĄŻ¼ę“┤╦š¹¾wĮYśŗꬊ▀ėąĘĆČ©ąįĪŻ
2Ż®╬óą═ÖCŲ„╚╦─▄ē“═©▀^é„ĖąŲ„╠Į£yšŽĄK╬’Ż¼Å─Č°čžų°┐╔ąą▀MĄ─┬ĘŠĆŪ░ąąĪŻŽĄĮyę¬į┌ęÄČ©Ą─ĘĮĘ©ęį╝░ĀŅæBŽ┬═Ļ│╔ę╗Č©Ą─╣”─▄Ż¼ę¬Š▀ėą┐╔┐┐ąįĪŻ
3Ż®ė╔ė┌╠Į£yÖCŲ„╚╦╣żū„ŁhŠ│Ą─▓╗┤_Č©ąįęį╝░ČÓūāąįŻ¼ī¦ų┬ŽĄĮyę¬ėą▀mæ¬═Ō▓┐ūā╗»Ą──▄┴”Ż¼ī”ė┌▓╗═¼Ą─ŁhŠ│ę¬ėąæ¬ūāĄ──▄┴”Ż¼╝┤▀mė├ąį╝░ČÓė├ąįĪŻ
2.2 ī¦ų┬É║╗»Ą─ģóöĄ
1Ż®┐╔ųŲįņąįĪŻ╬óą═╠Į£yÖCŲ„╚╦╗“ŽĄĮyųŲįņĄ─▀^│╠ę¬║åå╬Ż¼▀^ė┌Š½├▄Ą─ĮYśŗĢ■ī¦ų┬ųŲįņ║═ŠSą▐╔ŽĄ─└¦ļyĪŻ
2Ż®┐╔▓┘ū„ąįĪŻī”ė┌ęÄČ©Ą─╣”─▄Ż¼ę¬║åå╬ęūąą▓óŪęĘĮ▒Ń▓┘ū„ĪŻ
3Ż®ŽĄĮyĄ─Å═ļsąįĪŻ▀^ĘųÅ═ļsĄ─ŽĄĮyŻ¼ļm╚╗─▄Š½┤_Ąž═Ļ│╔Ė„ĒŚ╣”─▄Ż¼Ą½╩ŪĘ▒ČÓĄ─įŁ╝■öĄ─┐ęį╝░╣żū„Ą─ČÓśėąįĢ■ī¦ų┬┐žųŲęį╝░ųŲįņ╔ŽĄ─å¢Ņ}│÷¼FĪŻ
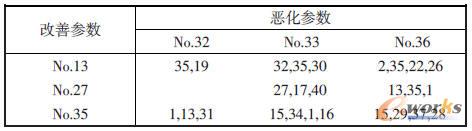
ė╔TRIZ└Ēšō┴ą│÷ø_═╗ŠžĻćŻ¼╚ń▒Ē1╦∙╩ŠĪŻŲõųąī”ė┌┤╦äōą┬įOėŗŽŻ═¹Ė─▀MĄ─ģóöĄą“╠¢×ķ13Īó27Īó32Ż¼ī¦ų┬É║╗»Ą─ģóöĄą“╠¢×ķ33Īó35Īó36ĪŻģóöĄų«ķgŽÓ╗źĮ╗▓µ│÷¼FĄ─ą“╠¢╝┤×ķĄ├ĄĮĄ─░l├„įŁ└ĒĪŻ╝┤Ą├ĄĮęįŽ┬ąĶę¬ė├░l├„įŁ└ĒĮŌøQĄ─ø_═╗ŠžĻćŻ¼╚ń▒Ē2╦∙╩ŠĪŻ
▒Ē1 ø_═╗ŠžĻć▒Ē

▒Ē2 ø_═╗ŠžĻć
2.3 ĮĶė├░l├„įŁ└Ē
Ė∙ō■ė╔ø_═╗ŠžĻćĄ├│÷Ą─äōą┬įŁ└ĒŻ¼öMČ©ÖCŲ„╚╦Ą─äōą┬įOėŗĘĮ░ĖŻ¼═©▀^║Y▀xŻ¼░l¼F┐╔ęįė├ĄĮĄ─░l├„įŁ└ĒėąŻ║
1Ż®ĘųĖŅįŁ└ĒŻ║Ż©1Ż®īó╬’¾wĘų│╔¬Ü┴óĄ─▓┐ĘųŻ╗Ż©2Ż®╩╣╬’¾w│╔×ķ┐╔▓ąČĄ─Ż╗Ż©3Ż®į÷╝ė╬’¾wĄ─ĘųĖŅ│╠Č╚ĪŻ2Ż®äėæB╗»Ż║Ż©1Ż®╩╣ę╗éĆ╬’¾w╗“ŲõŁhŠ│į┌▓┘ū„Ą─├┐ę╗éĆļAČ╬ūįäėš{š¹Ż¼ęį▀_ĄĮā×╗»Ą─ąį─▄Ż╗Ż©2Ż®░čę╗éĆ╬’¾wäØĘų│╔Š▀ėąŽÓ╗źĻPŽĄĄ─į¬╝■Ż¼į¬╝■ų«ķg┐╔ęįĖ─ūāŽÓī”╬╗ų├Ż╗Ż©3Ż®╚ń╣¹ę╗éĆ╬’¾w╩ŪäéąįĄ─Ż¼╩╣ų«ūā×ķ┐╔╗ŅäėĄ─╗“┐╔Ė─ūāĄ─ĪŻ
╠Į£yÖCŲ„╚╦Ą─ų„ę¬╣”─▄╩ŪīŹ¼Fį┌▓╗═¼ŁhŠ│Ž┬Ą─╠Į£y╚╬䚯¼ī”ė┌▓╗═¼Ą─┬Ę├µŁhŠ│ę▓ę¬ū÷│÷▓╗═¼Ą─▓ĮąąŽĄĮy┼c▓ĮæBęÄäØŻ¼ę“┤╦▓╔ė├ĘųĖŅįŁ└ĒŻ¼┐╔īóÖCąĄ═╚┼cš¹¾wĮYśŗĘųļxŻ¼═¼Ģrīó╔Ē¾wĮYśŗ┼c╠Į£yŲ„ĘųļxĪŻ▀@śėæ¬ė├“Šų▓┐ąį┘|”Ż¼┐╔╩╣╔Ē¾wĮYśŗĪóÖCąĄ═╚Īó╠Į£yŲ„Ė„▓┐ĘųĮYśŗś╦£╩╗»Īó─ŻēK╗»Ż¼▒Ńė┌Ė³ōQ║═ŠSą▐Ż¼ĮĄĄ═│╔▒Š╝░ųŲįņļyČ╚ĪŻ
╠Į£yÖCŲ„╚╦╚ń║╬ČŃ▒▄šŽĄK╬’Īó£╩┤_▓ó─▄ē“▀_ĄĮŪ░ąą╠Į£yĄ─╚╬䚯¼┼cÖCąĄ═╚Ą─ūįė╔│╠Č╚Īó╠Į£yŽĄĮyĄ─įOėŗęį╝░ą┼╠¢Ę┤ü┐ņ┬²ėąĻPŻ¼▀@ą®Č╝╩Ū┤_Č©╠Į£yÖCŲ„╚╦▀węŲąįĪóņ`╗Ņąį│╠Č╚Ė▀Ą═Ą─ų„ę¬ųĖś╦Ż╗═¼Ģrī”ė┌▓╗═¼Ą─╠Į£y╚╬䚯¼ąĶę¬Ė³ōQ▓╗═¼Ą─é„ĖąŲ„üĒīŹ¼F▓╗═¼Ą─╠Į£y╣”─▄Ż¼╠Į£yŲ„Ą─¬Ü┴óś╦£╩╗»Īó─ŻēK╗»┐╔ęįÄ═ų·╬óą═╠Į£yÖCŲ„╚╦īŹ¼FČÓ╣”─▄Ą─╠Į£y╚╬äšĪŻ
3 ╬óą═╠Į£yÖCŲ„╚╦äōą┬įOėŗ
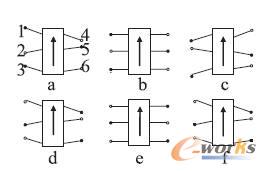
æ¬ė├TRIZ└ĒšōĄ─äėæB╗»įŁ└ĒįOėŗ┴╦╬óą═╠Į£yÖCŲ„╚╦Ą─═╚▓┐ĮYśŗŻ¼ę╗░Ń▓╔ė├Š▀ėą╚²éĆ▐DäėĻP╣ØĄ─ĮYśŗŻ║ŲõųąĖ∙ĻP╣Øė├ė┌é╚ö[Ż¼¾yĻP╣Øė├ė┌Ė®č÷Ż¼ŽźĻP╣Øė├ė┌Ū³╔ņŻ¼├┐éĆĻP╣ØČ╝ė╔¬Ü┴óļŖÖC“īäėĪŻė╔ė┌═╚▓┐ĻP╣Ø╩ŪŃqĮėŻ¼ę“Č°į┌▓ĮąąĢr╝┤╩╣│÷¼F╩¦ĘĆ¼FŽ¾ę▓Š▀ėą▌^ÅŖĄ─ū╦æB╗ųÅ═─▄┴”ĪŻæ¬ė├Ę┬╔·ÖCŲ„╚╦─┐Ū░░lš╣Ą─ŪķørŻ¼┐╔└¹ė├Ę┬╔·┴∙ūŃÖCŲ„╚╦ÖCąĄ═╚▓┐įOėŗüĒ═Ļ│╔äōą┬Ż¼ÖCśŗ╩ŠęŌłDŻ¼╚ńłD2╦∙╩ŠĪŻ
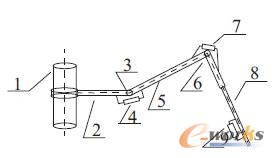
1-╔Ē¾wĮYśŗŻ╗2-é╚ö[═╚Ż╗3-¾yĻP╣ØŻ╗4-¾yĻP╣ØļŖÖCŻ╗5-č÷Ė®═╚Ż╗
6-ŽźĻP╣ØŻ╗7-ŽźĻP╣ØļŖÖCŻ╗8-╔ņ┐s═╚Ż╗9-╔ņ┐s═╚ļŖÖC
łD2 ╬óą═╠Į£yÖCŲ„╚╦ÖCśŗ
═╚▓┐┼cš¹¾wĮYśŗæ¬ė├ĘųĖŅįŁ└ĒŻ¼╝┤ī”ė┌▓╗═¼Ą─ŁhŠ│ĀŅørŻ¼┐╔ōQė├▓╗═¼Ą─ÖCąĄ═╚Ż¼╚ń▌å╩ĮęŲäėĘĮ╩ĮÖCąĄ═╚Īó┬─Ħ╩ĮĄ╚ĪŻ╬─ųą▓╔╚Ī┴∙ūŃ═╚▓┐ĮYśŗ▀Mąąäōą┬蹊┐Ż¼═╚▓┐Ą─╚²éƬÜ┴óļŖÖCųąėąā╔éĆĘųäe┐žųŲā╔éĆ▐DäėĻP╣ØŻ¼┴Ē═Ōę╗éĆīŹ¼FÖCąĄ═╚Ą─╔ņ┐s╣”─▄Ż¼▒Ńė┌╠Į£yÖCŲ„╚╦Ą─┼╩┼└ĪŻ┴∙ūŃ╬óą═ÖCŲ„╚╦Ą─▓ĮæBęįĄõą═Ą─“3+3”ąąū▀▓ĮæBįOėŗŻ¼īó╬óą═ÖCŲ„╚╦Ą─┴∙Śl═╚Ęų×ķā╔ĮMŻ¼ęį═╚1Ż¼3Ż¼5×ķę╗ĮMŻ¼├³├¹AĮMŻ¼ęį2Ż¼4Ż¼6×ķę╗ĮMŻ¼├³├¹BĮMŻ¼ęįAĮMĄĮBĮMĄ─ö[═╚Ēśą“Ż¼ęÄäØ╬óą═ÖCŲ„╚╦į┌ę╗éĆ▓ĮæBų▄Ų┌ųąĄ─▓ĮąąŻ¼╚ńłD3╦∙╩ŠĪŻ
łD3 ┴∙ūŃ▓ĮæBęÄäØ
1Ż®ÖCŲ„╚╦ķ_╩╝▀\äėŻ¼AĮM£╩éõŽ“Ū░ö[äėŻ¼BĮM╠Äė┌ų¦ō╬ĀŅæBŻ╗2Ż®AĮMö[ŲŻ¼Ž“Ū░┐ń▓ĮŻ¼BĮMų¦ō╬Ż¼ųžą─Ū░ęŲŻ╗3Ż®BĮM═╚ę╗▀ģų¦ō╬ÖCŲ„╚╦▒Š¾wŻ¼ę╗▀ģ“īäėÖCŲ„╚╦╩╣ŲõŽ“Ū░ęŲäė░ļéĆ▓ĮķLŻ╗4Ż®į┌ÖCŲ„╚╦ęŲäėĄĮ╬╗ĢrŻ¼AĮMĘ┼Ž┬Ż¼ūā│╔ų¦ō╬æBŻ¼╩╣ÖCŲ„╚╦Ą─ųžą─ūā│╔į┌▀@╚²═╚╦∙śŗ│╔Ą─╚²ĮŪą╬ā╚▓┐Ż¼įŁBĮMų¦ō╬═╚╠¦ŲŻ¼£╩éõŽ“Ū░ö[äėŻ╗5Ż®BĮMö[ŲŻ¼Ž“Ū░┐ń▓ĮŻ¼AĮMų¦ō╬Ż¼ųžą─Ū░ęŲŻ╗6Ż®ų¦ō╬═╚ę╗▀ģų¦ō╬ÖCŲ„╚╦▒Š¾wŻ¼ę╗▀ģ“īäėÖCŲ„╚╦╩╣ŲõŽ“Ū░ęŲäėę╗éĆ▓ĮķLĪŻ
├┐Śl═╚Ą──®Č╦Č╝┐╔ęį╔ņķL╗“š▀┐sČ╠Ż¼«öė÷ĄĮšŽĄK╬’Ģr┐╔ęįš{╣ØķLČ╚Ż¼▒Ńė┌įĮ▀^šŽĄK╬’ĪŻ«öšŽĄK╬’Ą─Ė▀Č╚ØMūŃę╗Č©Ą─Śl╝■ĢrŻ¼╬óą═ÖCŲ„╚╦įĮšŽīó▓╔ė├“╚²ĮŪ▓ĮæB”üĒįĮ▀^šŽĄKŻ╗╚¶šŽĄK╬’Ą─Ė▀Č╚│¼▀^ę╗Č©ĘČć·Ż¼ÖCŲ„╚╦īó▓╔ė├“ČÓ▀ģą╬▓ĮæB”üĒ▀MąąįĮšŽŻ¼▓óŪę▓╔ė├“ČÓ▀ģą╬▓ĮæB”Ż¼ÖCŲ„╚╦Ą─įĮšŽ─▄┴”├„’@Ģ■╠ßĖ▀ĪŻ
╬óą═ÖCŲ„╚╦Ą─▒│▓┐┐╔Ė³ōQ▓╗═¼Ą─é„ĖąŲ„üĒī”═Ļ│╔▓╗═¼Ą─╠Į£y╚╬䚯¼▓╔ė├“Šų▓┐ąį┘|”Ż¼┐╔ęį╩╣╔Ē¾wĮYśŗ┼c╠Į£yŲ„┐╔ĘųļxŻ¼ėą└¹ė┌╠Į£yŲ„Ą─ś╦£╩╗»┼c─ŻēK╗»ĪŻ
4 ĮY╩°šZ
═©▀^Ęų╬÷╬óą═╠Į£yÖCŲ„╚╦įOėŗųą┤µį┌Ą─╝╝ągø_═╗å¢Ņ}Ż¼ĮY║Ž┴∙ūŃĘ┬╔·ÖCŲ„╚╦Ą─蹊┐¼FĀŅŻ¼įOėŗ│÷┴╦ę╗ĘNś╦£╩╗»Īó─ŻēK╗»Ą─╬óą═╠Į£yÖCŲ„╚╦Ż¼─▄ē“═Ļ│╔į┌▓╗═¼ŁhŠ│Ž┬╠Į£yĄ─╚╬䚯¼═¼ĢrŠ▀ėąę╗Č©Ą─įĮšŽ─▄┴”Ż¼─▄ē“Ä═ų·╦čŠ╚╚╦åTį┌ūį╚╗×─║”ęį╝░ęŌ═Ō╩┬╣╩ųąŻ¼£╩┤_╠Į£yĄĮ鹚▀╦∙╠ÄĄ─Ąž└Ē╬╗ų├Ż¼ĘĮ▒ŃŠ╚į«ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.hanmeixuan.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌TRIZ└ĒšōĄ─╬óą═╠Į£yÖCŲ„╚╦äōą┬įOėŗ
▒Š╬─ŠWųĘŻ║http://m.hanmeixuan.com/html/solutions/14019314169.html